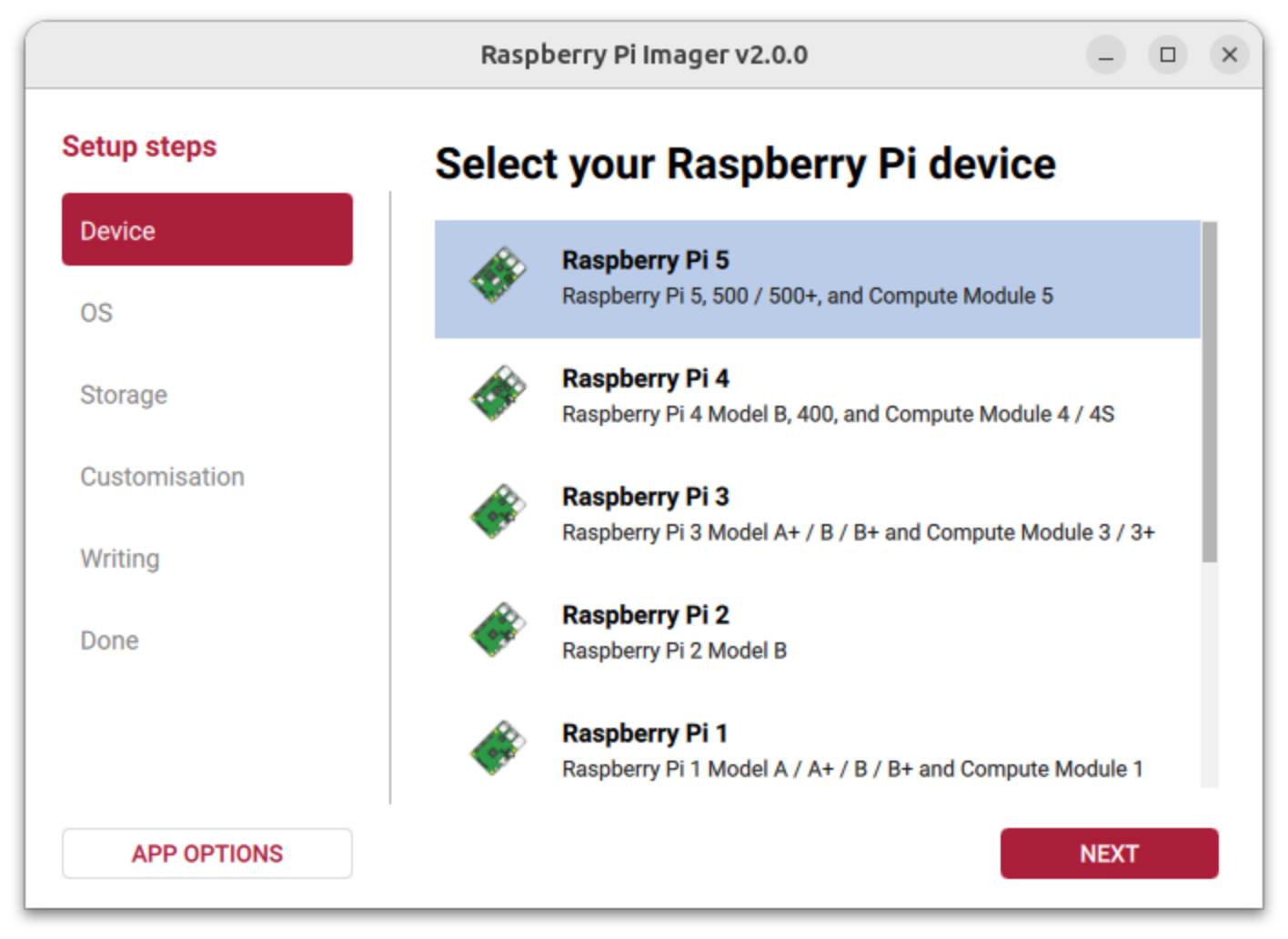
Raspberry Pi Imager 2.0 только что был выпущен с обновленным пользовательским интерфейсом с мастером для облегчения навигации, а также новой опцией для удаленного доступа Raspberry Pi Connect, среди других изменений.
Утилита Raspberry Pi Imager была впервые выпущена в марте 2020 года для улучшения пользовательского опыта при записи образов ОС для Raspberry Pi на карту microSD. Нет необходимости загружать образ ОС с веб-сайта и вручную записывать его на карту microSD с помощью инструментов командной строки dd, Win32DiskImager или BalenaEtcher. Просто выберите модель Raspberry Pi, нужный образ из курируемого списка и устройство хранения, и все готово. Популярной функцией были настройки кастомизации ОС, но список стал довольно большим, и это одна из основных причин выпуска утилиты Raspberry Pi Imager 2.0.