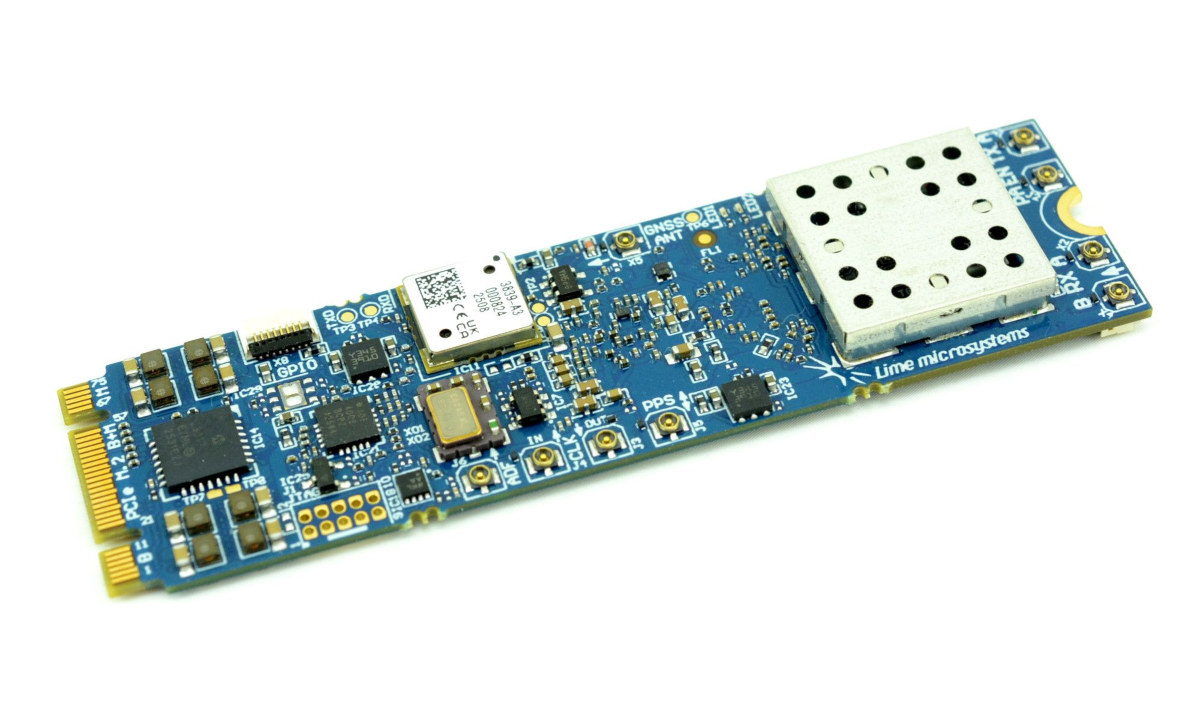
Беспроводной радиомодуль для передачи данных 8devices Maca 2 высокой мощности с поддержкой plug-and-play и сверхдальним действием предназначен для дронов, UAS, робототехники, систем перехвата, промышленного IoT и связи оборонного класса, где критически важны большая дальность, устойчивость и масштабируемость.
Устройство оснащено высокой мощностью передачи до 39 дБм (с 36 дБм на каждую RF-цепь) и чувствительностью приемника –98 дБм, а также предназначено для связи типа воздух-земля и точка-точка на расстояниях до 80 км. Для поддержания стабильных соединений на экстремальных расстояниях радиомодуль поддерживает сверхузкую ширину каналов от 1,5 МГц до 19,5 МГц, значительно улучшая отношение сигнал-шум и устойчивость к помехам и глушению. Кроме того, он включает два порта Ethernet, USB 2.0, UART, GPIO и вход питания 14–33 В. Он также поддерживает работу в промышленном температурном диапазоне и производство, соответствующее требованиям NDAA/TAA.
Читать далее «8devices Maca 2 – Сверхдальнодействующий радиомодуль для передачи данных с дальностью 80 км для дронов и робототехники»