SiFive только что анонсировала свое семейство Intelligence второго поколения, включающее пять новых продуктов на базе RISC-V: новые X160 Gen 2 и X180 Gen 2, а также обновленные процессоры X280 Gen 2, X390 Gen 2 и XM Gen 2, все они обладают возможностями скалярной, векторной и матричной обработки (только XM), предназначенными для рабочих нагрузок ИИ.
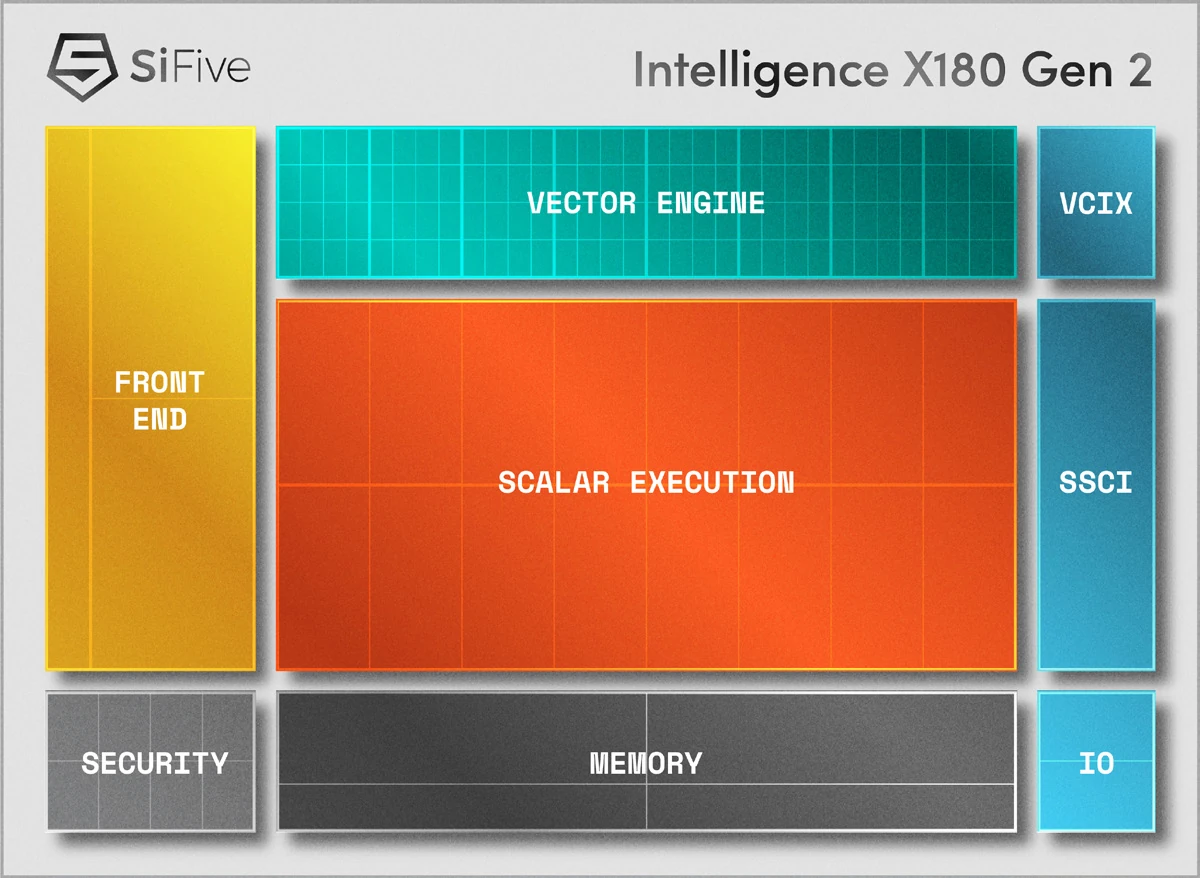
Оригинальный 64-битный RISC-V процессор Intelligence X280 был представлен в 2021 году, за ним последовал нейропроцессор Intelligence X390 в 2023 году и серия Intelligence XM в сентябре 2024 года. X160 Gen 2 (32-битный) и X180 Gen 2 (64-битный) являются базовыми AIoT ядрами, ориентированными на периферийные вычисления и IoT-приложения для автомобильной промышленности, автономной робототехники, промышленной автоматизации и умных IoT-устройств. Обновленные модели получают поддержку профиля RVA23 и некоторые другие изменения.