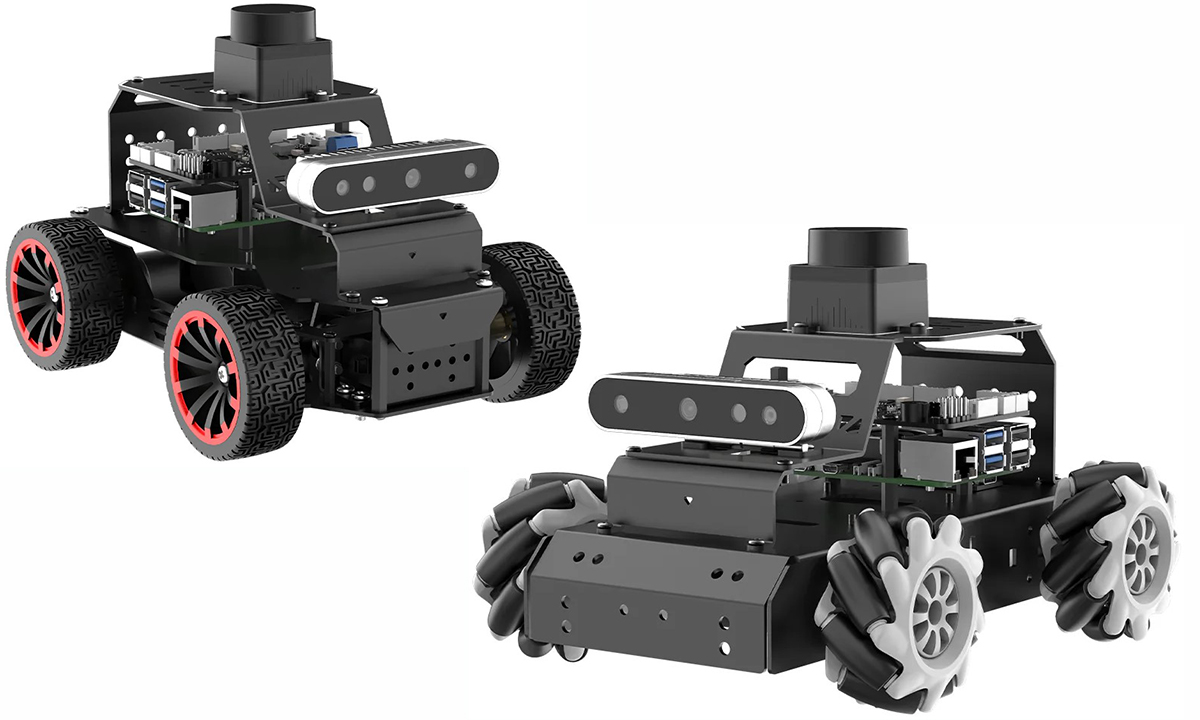
Компания Waveshare недавно выпустила RoArm-M2-S и RoArm-M2-Pro ESP32 роботизированные манипуляторы с четырьмя степенями свободы, или 4-DOF для краткости. Главное отличие заключается в том, что RoArm-M2-S оснащен стандартными сервоприводами, в то время как RoArm-M2-Pro оснащен полностью металлическими сервоприводами шины ST3235, что добавляет больше прочности и производительности.
Читать далее «Роботизированные манипуляторы Waveshare RoArm-M2 ESP32 предлагают четыре степени свободы, различные варианты сервоприводов»Роботизированные манипуляторы Waveshare RoArm-M2 ESP32 предлагают четыре степени свободы, различные варианты сервоприводов