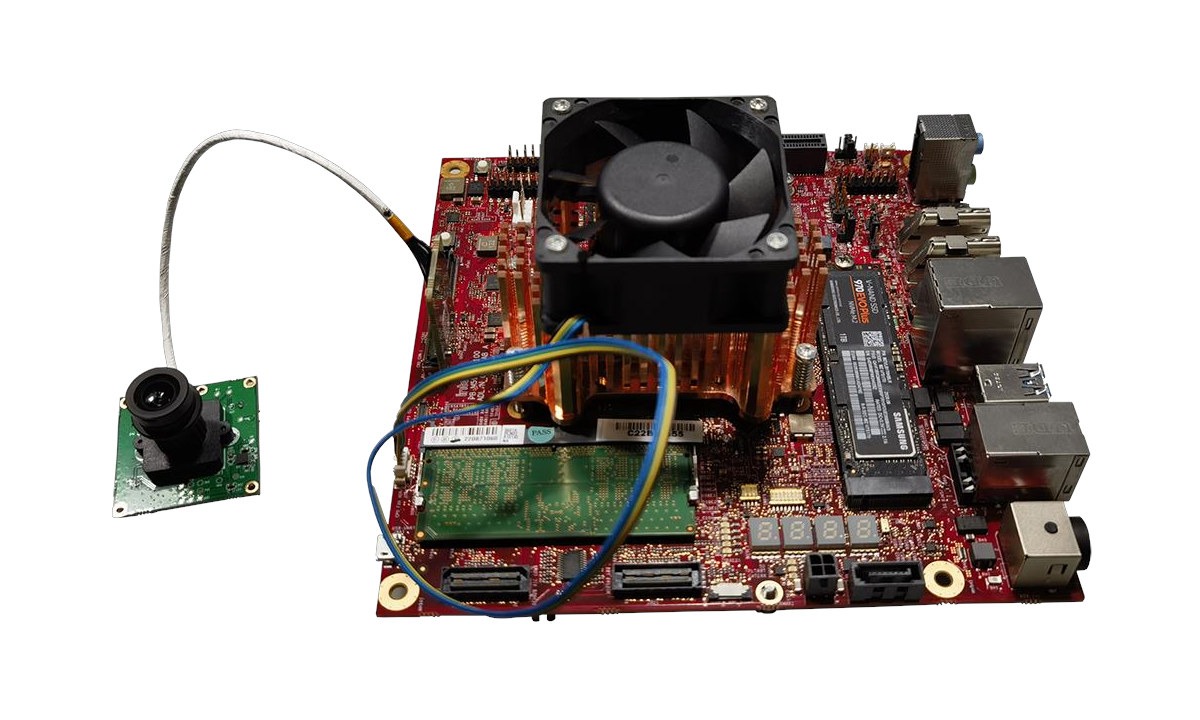
Большинство камер MIPI CSI не поддерживаются процессорами Intel, но некоторые оснащены процессорами Alder Lake-N. Компания Leopard Imaging разработала модуль камеры MIPI CSI LI-ADL-ADP-IMX415-MIPI-081H, совместимый с Intel ADL- N CRB (Alder Lake-N Customer Reference Board) и специальные платы Alder Lake-N, оснащенные совместимым разъемом MIPI CSI.
13-мегапиксельная камера поддерживает разрешение до 3864 x 2176 и работает с платами и встраиваемыми системами на базе процессоров Intel Atom серии x7000E, процессоров Intel Core i3-N и процессоров Intel Processors N-Series.
Читать далее «Камера MIPI CSI работает с процессорами Intel Atom x7000 и Core i3 Alder Lake-N»