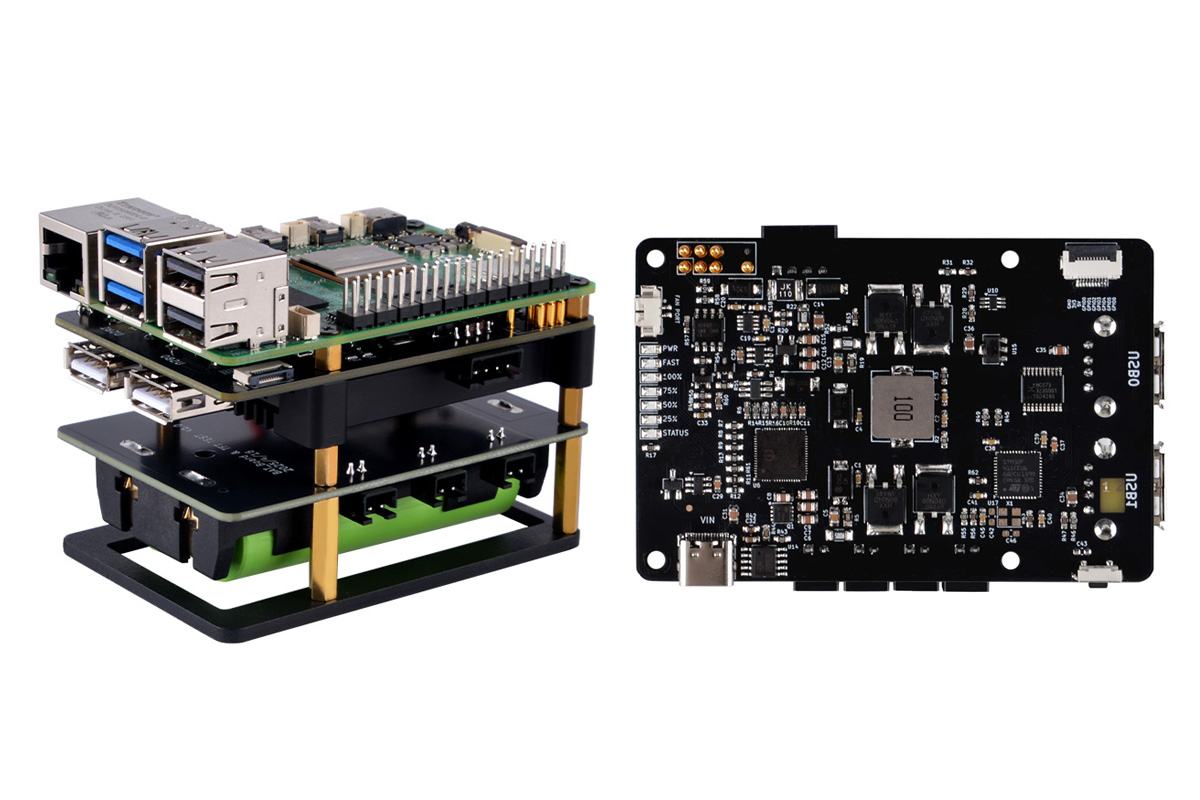
Компания SunFounder предоставила образец для обзора платы расширения Fusion HAT+ для Raspberry Pi , разработанной для управления моторами и сервоприводами с использованием аудиовзаимодействия благодаря встроенным микрофону и динамику, а также моделям LLM. Она может использоваться в качестве контроллера робота с поддержкой ИИ, хаба для умного дома, голосового помощника или интерактивной образовательной платформы.
В этом обзоре, после распаковки и установки Fusion HAT+ на Raspberry Pi 5 с 2 ГБ ОЗУ, основное внимание будет уделено части голосового взаимодействия с использованием преобразования текста в речь (TTS), речи в текст (STT), а также локальных и облачных моделей LLM и VLM. Также будет быстро протестировано управление сервоприводом для махания флагом с помощью голосовых команд.