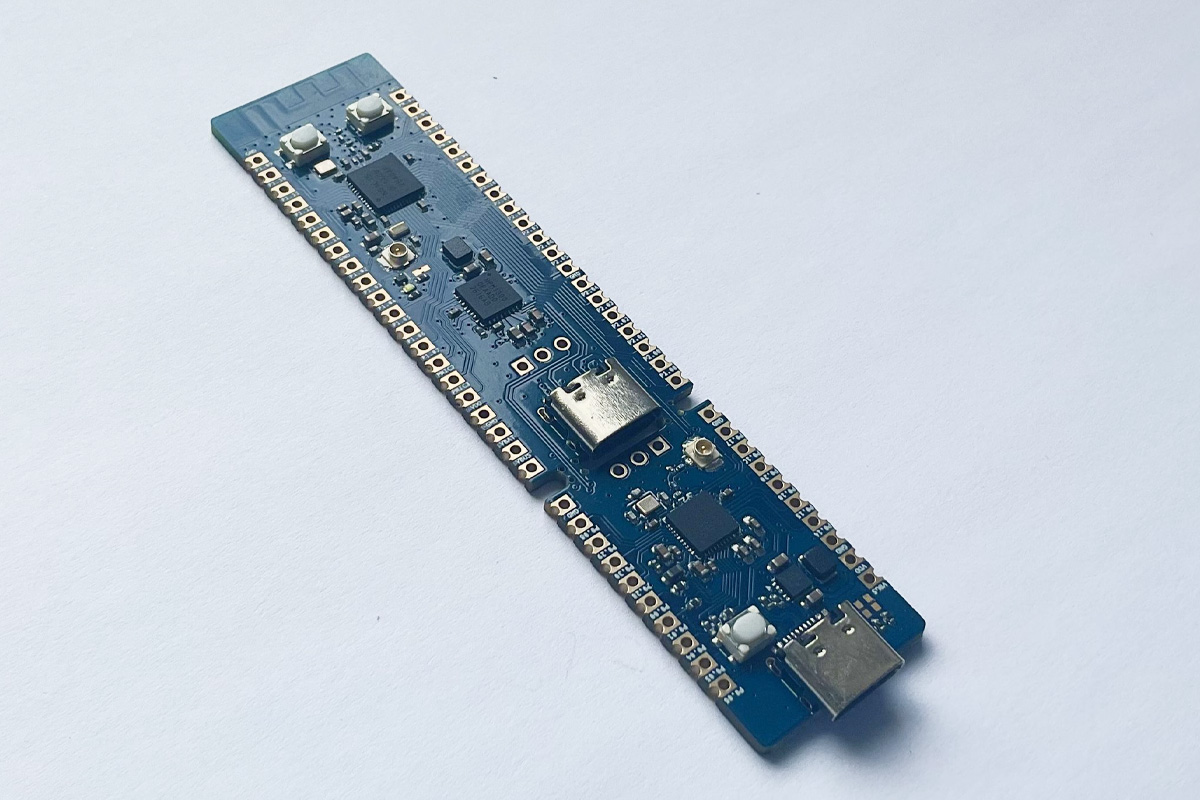
SensWear — это открытая аппаратная платформа для разработки носимых устройств на базе Nordic nRF54L15 Bluetooth LE SoC и набора сенсоров, предназначенная для исследователей, разработчиков и компаний, создающих умные кольца, браслеты, пластыри и другие пользовательские устройства.
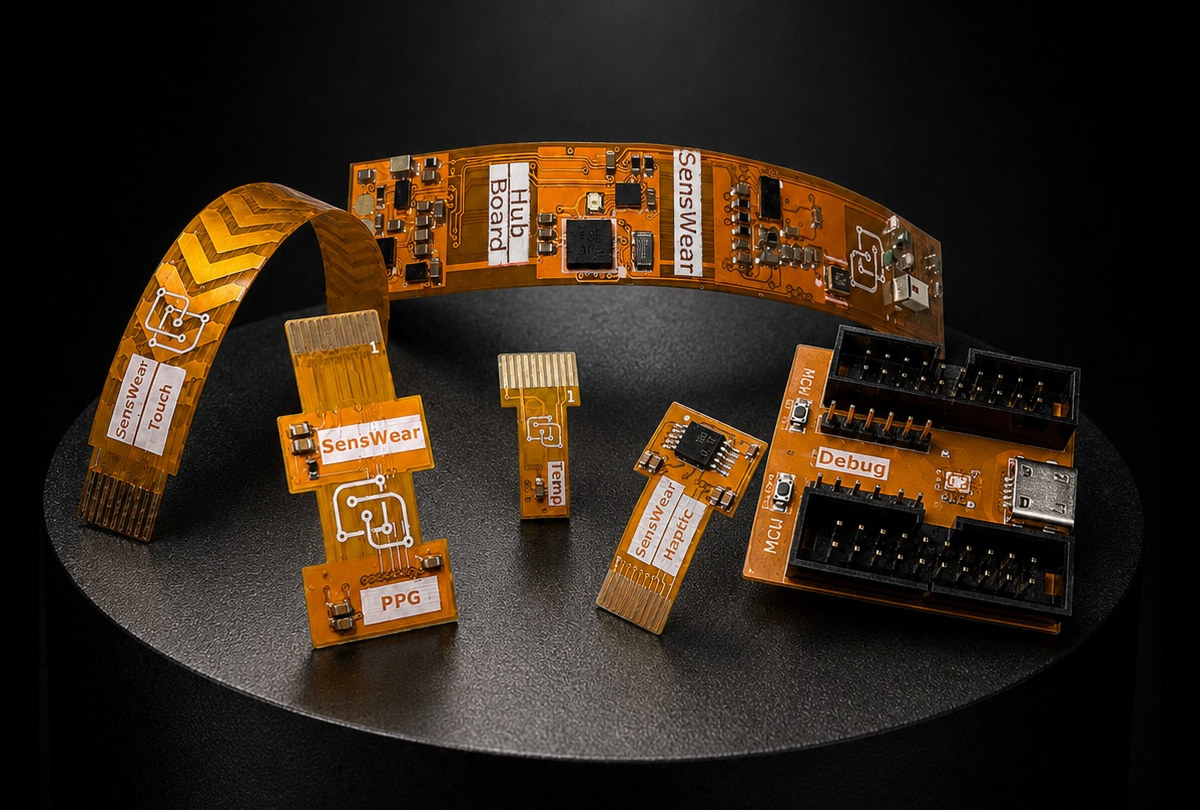
Решение в основном состоит из гибких плат, включая основную плату SensWear с микроконтроллером nRF54L15 и 6-осевым IMU-сенсором, а также дочерние платы с PPG и оптическим зондированием, измерением температуры, емкостным сенсорным управлением или тактильной обратной связью.