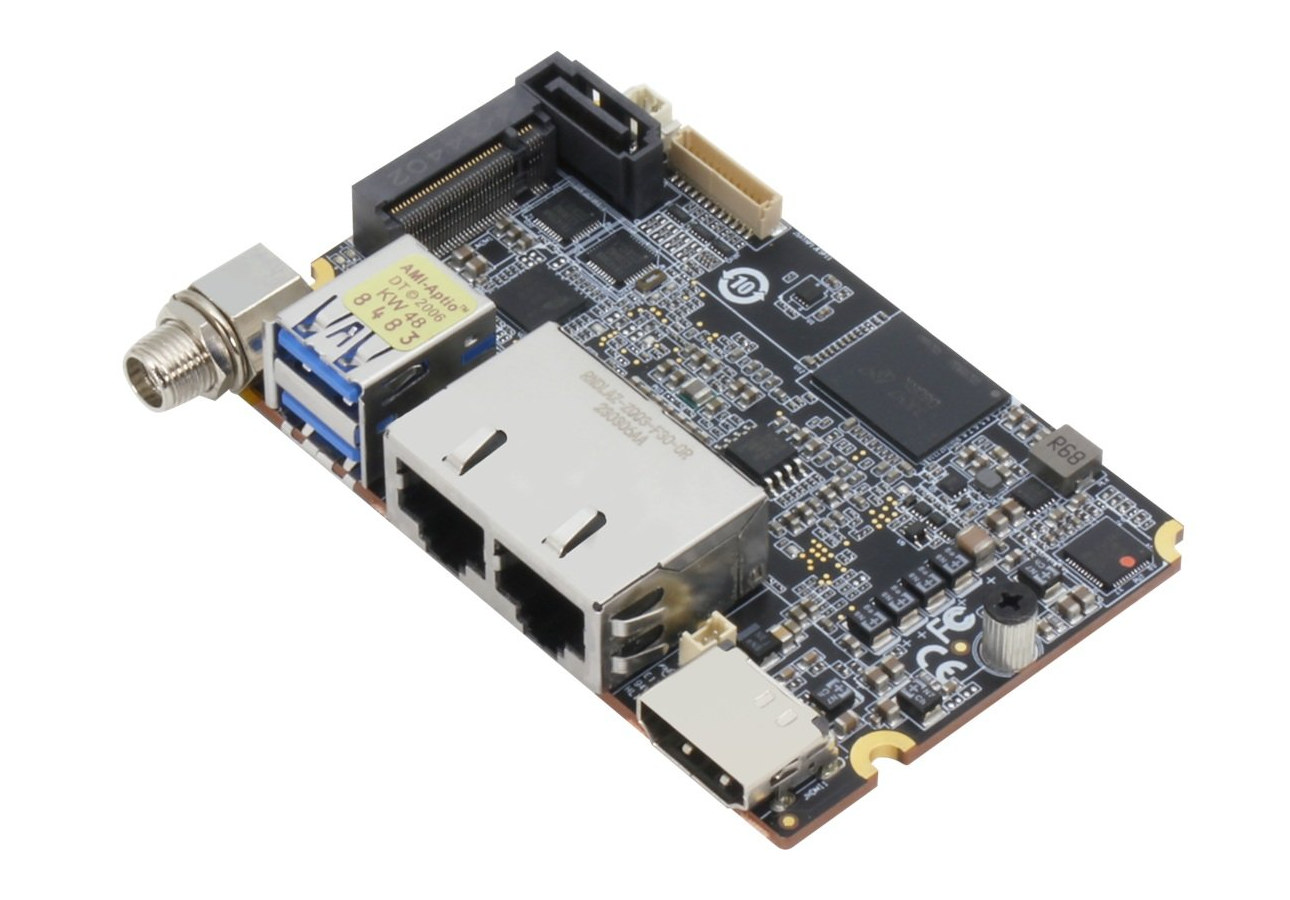
AAEON de next-RAP8, возможно, является самым мощным в мире одноплатным компьютером при этом имеет размер с кредитную карту. Устройство оснащено процессором Intel Raptor Lake мощностью 15 Вт, а именно шестиядерным процессором Core i3-1315UE SoC или 10-ядерным процессором Core i5-1335UE или Core i7-1365UE.
AAEON de next-RAP8 Raptor Lake SBC размером с кредитную карту оснащен процессором Intel Core i7-1365UE