
В прошлом месяце мы получили комплект разработчика Microchip PolarFire SoC FPGA Icicle, оснащенный PolarFire SoC FPGA, состоящим из подсистемы RISC-V CPU с пятью 64-битными ядрами и FPGA с 254K LE, и загрузили предустановленный образ операционной системы Linux на основе OpenEmbedded.
Сегодня мы покажем, как начать работу с Yocto BSP и запустить тест EEMBC CoreMark, а через пару недель мы проверим FPGA с Libero SoC Design Suite.
Операционные системы, поддерживаемые PolarFire SoC FPGA
Первоначально, идея заключалась в том, чтобы сосредоточить эту часть обзора на Linux, проверке некоторой системной информации, запуске некоторых тестов (например, SBC-Bench), компиляции ядра Linux и установке таких сервисов, как стек LEMP (Linux, Nginx (произносится как Engine-X), MySQL, PHP), который может использоваться, например, для хостинга WordPress. Но затем мы посмотрели на операционные системы, поддерживаемые Microchip PolarFire SoC FPGA.

Есть Yocto Linux BSP и Buidlroot Linux BSP, поддерживаемые Microchip, а также дистрибутивы Embedded Linux от третьих сторон, таких как Siemens Embedded и WindRiver. Говорят, что скоро появится FreeBSD, и несколько операционных систем реального времени.
Это означает, что нет менеджера пакетов и корневой файловой системы на основе Debian, за исключением некоторых инструментов, которые мы планировали использовать. Чтобы достичь того, что мы намеревались сделать, понадобится более 100 часов работы, которых у нас нет… Поэтому мы уменьшили свой пыл и вместо этого поделимся с вами нашим опытом создания образа Yocto, кросс-компиляция hello world, а также встроенной компиляции и запуске теста EEMBC. Мы не в первый раз работаем с Yocto Project, но мы все же узнали кое-что новое в процессе, и мы надеемся, что и вы тоже.
Демонстрация веб-сервера и аналитика напряжения/тока
Перед тем, как приступить к работе над Yocto BSP, мы подключили плату к Ethernet, чтобы выполнить руководство по началу работы от Microchip, и запустили веб-сервер.
$ cd /opt/microchip/iiohttpserver
$ ./runМы можем получить доступ к веб-странице, на которой будут отображаться напряжение и ток для VDDA (XCVR Tx/Rx Lanes Supply), VDD25 (PLL и PNVM Supply), VDDA25 (XCVR PLL Supply) и VDD (Core Supply), перейдя по адресу http://<board_ip_address>
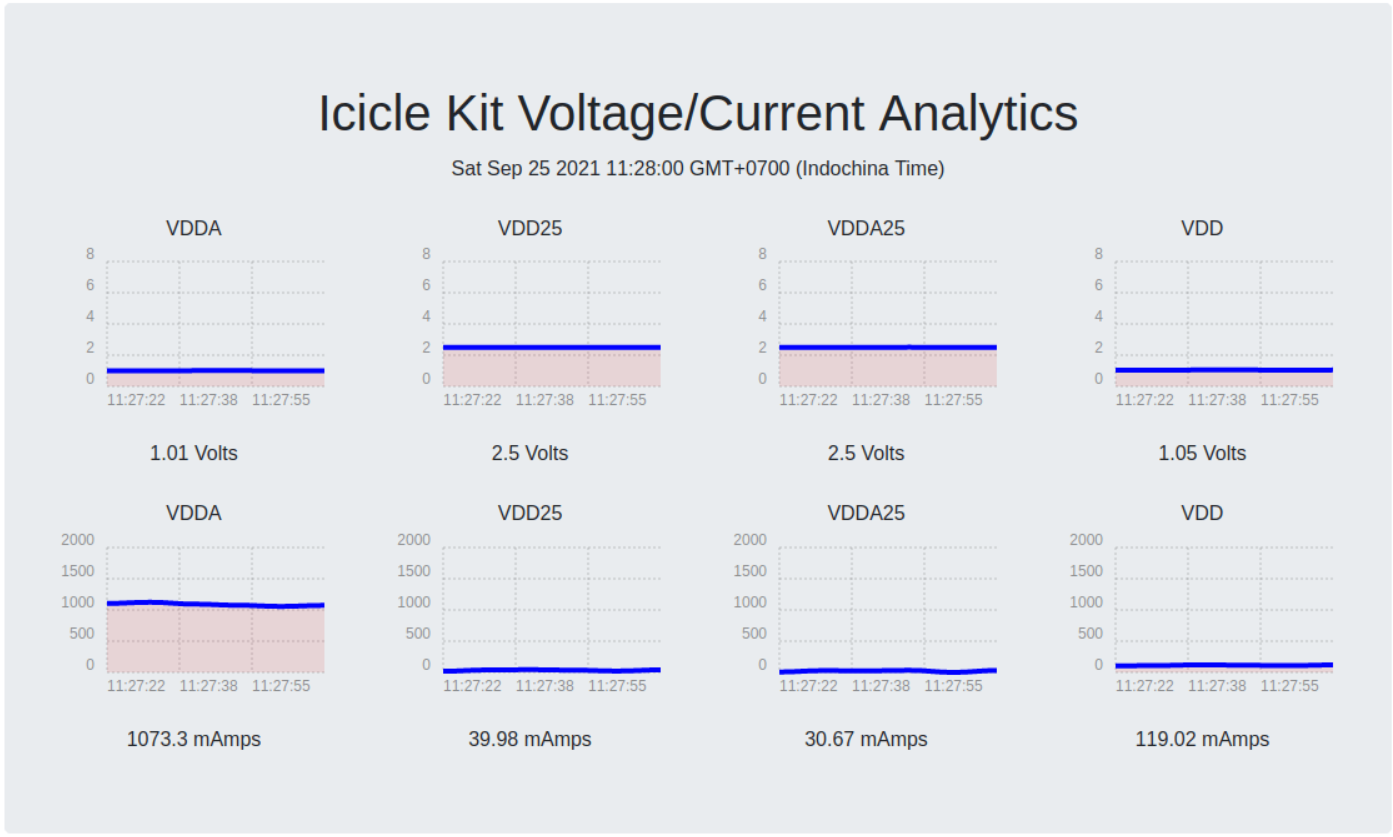
Будет интересно вернуться на эту страницу после того, как мы запустим тест EEMBC CoreMark.
Yocto Linux BSP
Давайте соберем Linux с помощью Yocto BSP, как описано на Github. Для справки, мы используем ноутбук под управлением Ubuntu 20.04, и нам пришлось изменить некоторые команды.
Для начала установим утилиту repo:
export REPO=$(mktemp /tmp/repo.XXXXXXXXX)
curl -o ${REPO} https://storage.googleapis.com/git-repo-downloads/repo
gpg --keyserver hkps://keyserver.ubuntu.com --recv-key 8BB9AD793E8E6153AF0F9A4416530D5E920F5C65
curl -s https://storage.googleapis.com/git-repo-downloads/repo.asc | gpg --verify - ${REPO} && install -m 755 ${REPO} ~/затем несколько зависимостей:
sudo apt install python3-distutils libyaml-dev libelf-dev chrpath diffstat
Время инициализировать repo:
~/bin/repo init -u https://github.com/polarfire-soc/meta-polarfire-soc-yocto-bsp.git -b master -m tools/manifests/riscv-yocto.xml
Теперь мы можем настроить сборку:
. ./meta-polarfire-soc-yocto-bsp/polarfire-soc_yocto_setup.sh
/home/jaufranc/edev/Microchip/yocto-dev
expect is already installed at the requested version (5.45.4-2build1)
expect is already installed at the requested version (5.45.4-2build1)
No packages will be installed, upgraded, or removed.
0 packages upgraded, 0 newly installed, 0 to remove and 9 not upgraded.
Need to get 0 B of archives. After unpacking 0 B will be used.
spawn sudo dpkg-reconfigure -freadline dash
sudo] password for jaufranc:
Configuring dash
----------------
The system shell is the default command interpreter for shell scripts.
Using dash as the system shell will improve the system's overall performance. It
does not alter the shell presented to interactive users.
Use dash as the default system shell (/bin/sh)? [yes/no] yes
Init OE
### Shell environment set up for builds. ###
You can now run 'bitbake <target>'
Common targets are:
core-image-minimal
core-image-full-cmdline
core-image-sato
core-image-weston
meta-toolchain
meta-ide-support
You can also run generated qemu images with a command like 'runqemu qemux86'.
Other commonly useful commands are:
- 'devtool' and 'recipetool' handle common recipe tasks
- 'bitbake-layers' handles common layer tasks
- 'oe-pkgdata-util' handles common target package tasks
Adding layers
NOTE: Starting bitbake server...
NOTE: Starting bitbake server...
NOTE: Starting bitbake server...
NOTE: Starting bitbake server...
NOTE: Starting bitbake server...
NOTE: Starting bitbake server...
Creating auto.conf
To build an image run
---------------------------------------------------
MACHINE=icicle-kit-es bitbake mpfs-dev-cli
---------------------------------------------------
Buildable machine info
---------------------------------------------------
Default MACHINE=icicle-kit-es
* icicle-kit-es: Microchip Polarfire SoC Icicle Kit Engineering Sample, emmc/sd boot.
* qemuriscv64: The 64-bit RISC-V machine
---------------------------------------------------
Bitbake Image
---------------------------------------------------
* mpfs-dev-cli: MPFS Linux console-only image with development packages.
* core-image-minimal-dev: OE console-only image, with some additional development packages.
* core-image-minimal: OE console-only image
* core-image-full-cmdline: OE console-only image with more full-featured Linux system functionality installed.
* qemuriscv64: The 64-bit RISC-V machine
---------------------------------------------------Чтобы начать сборку, выполните следующую команду:
MACHINE=icicle-kit-es bitbake mpfs-dev-cliСистема сборки Yocto может занять много времени. Около 10 лет назад мы потратили более 24 часов на создание образа на недорогом ноутбуке с настройками по умолчанию. Наш ноутбук работает на 8-ядерном процессоре AMD Ryzen 7 2700U и оснащен 16 ГБ оперативной памяти, быстро становится очень медленным и почти непригодным для использования при загрузке процессора 50+:
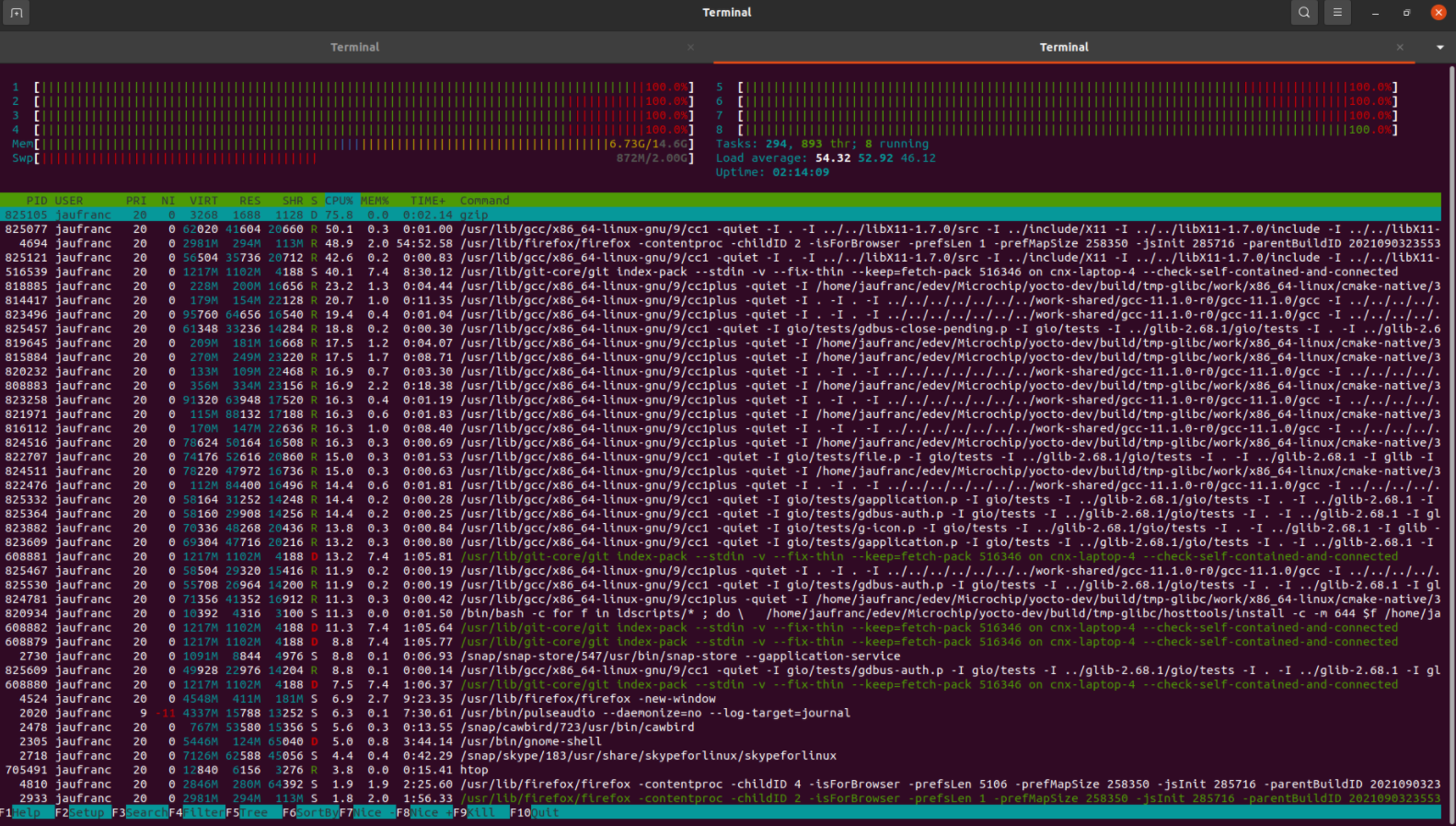
Мы не стали торопить события. Но мы не проверили требования к хранилищу, и сборка остановилась примерно через два часа из-за того, что на нашем жестком диске заканчивается место. Как мы увидим, когда сборка будет завершена, потребуется около 100 ГБ бесплатного хранилища.
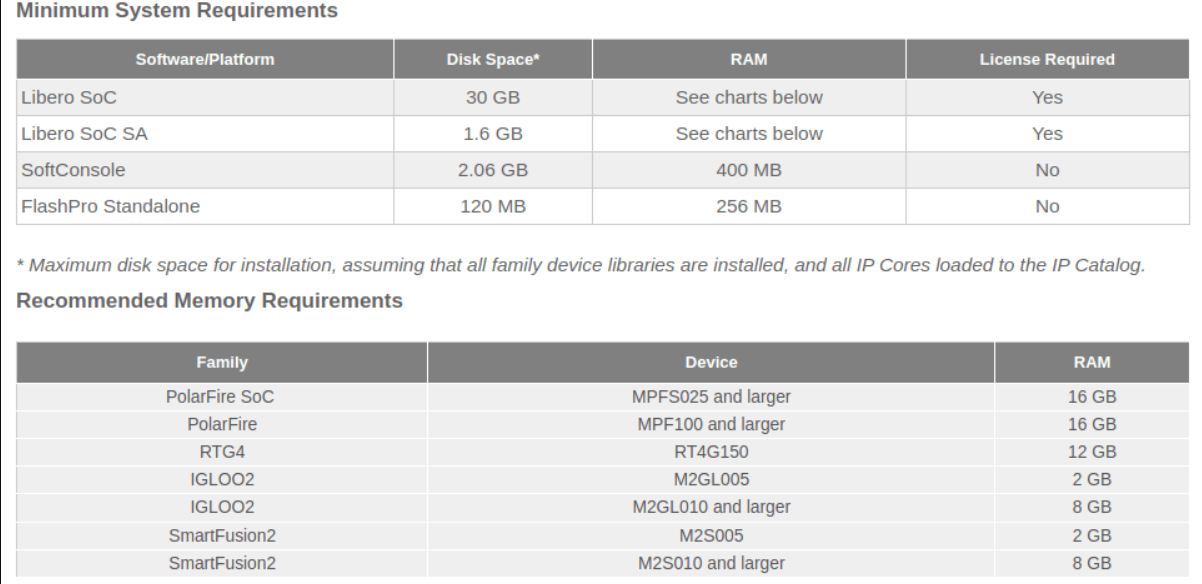
Пока мы говорим о системных требованиях, для пакета проектирования Libero SoC потребуется около 35 ГБ дополнительного места, а для разработки PolarFire SoC не менее 16 ГБ ОЗУ. Поэтому вам понадобится мощная рабочая станция для разработки приложений на комплекте разработки PolarFire SoC FPGA Icicle с большим объемом оперативной памяти и достаточным объемом памяти.
Вернемся к нашей сборке Yocto. Идеально было бы иметь выделенный сервер сборки, но если вы собираетесь использовать свой компьютер одновременно со сборкой, вы можете отредактировать [your_yocto_build_dir] /conf/local.conf
BB_NUMBER_THREADS = "4"
PARALLEL_MAKE = "-j 4"тогда
source setup-environment ./your_build_folderПеред началом сборки…
Альтернативой является приостановка сборки с помощью Ctrl-Z, который работает аналогично Ctrl-C, но использует SIGTSTP вместо SIGINT, чтобы приостановить процесс, а не завершить его.
time MACHINE=icicle-kit-es bitbake mpfs-dev-cli
Loading cache: 100% | | ETA: --:--:--
Loaded 0 entries from dependency cache.
Parsing recipes: 100% |##########################################| Time: 0:01:43
Parsing of 2381 .bb files complete (0 cached, 2381 parsed). 3667 targets, 166 skipped, 0 masked, 0 errors.
NOTE: Resolving any missing task queue dependencies
Build Configuration:
BB_VERSION = "1.51.0"
BUILD_SYS = "x86_64-linux"
NATIVELSBSTRING = "ubuntu-20.04"
TARGET_SYS = "riscv64-oe-linux"
MACHINE = "icicle-kit-es"
DISTRO = "nodistro"
DISTRO_VERSION = "nodistro.0"
TUNE_FEATURES = "riscv64"
meta = "HEAD:14795ee305f3c11fcc31cc7ca815b8ff1020e29a"
meta-oe
meta-python
meta-multimedia
meta-networking = "HEAD:dcb9ecc1e5720c9614b1cd27575e1e4886dff5c1"
meta-riscv = "HEAD:35d1d5849294ff9f2fb98b90657bbf7a1e532d0d"
meta-polarfire-soc-yocto-bsp = "HEAD:3c53ffcae8ac86686a53cd15b4541fc7eca1e36f"
NOTE: Fetching uninative binary shim http://downloads.yoctoproject.org/releases/uninative/3.1/x86_64-nativesdk-libc.tar.xz;sha256sum=5d0611df544edff6428cef7d871257a91aa6ba1bd92f5365a2df8deb54b6b31e (will check PREMIRRORS first)
Initialising tasks: 100% |#######################################| Time: 0:00:11
Sstate summary: Wanted 2529 Local 0 Network 0 Missed 2529 Current 0 (0% match, 0% complete)
NOTE: Executing Tasks
WARNING: expat-native-2.3.0-r0 do_fetch: Failed to fetch URL https://downloads.sourceforge.net/expat/expat-2.3.0.tar.bz2, attempting MIRRORS if available
WARNING: libtalloc-2.3.2-r0 do_fetch: Failed to fetch URL https://www.samba.org/ftp/talloc/talloc-2.3.2.tar.gz, attempting MIRRORS if available
WARNING: boost-1.76.0-r0 do_fetch: Failed to fetch URL https://dl.bintray.com/boostorg/release/1.76.0/source/boost_1_76_0.tar.bz2, attempting MIRRORS if available
WARNING: htop-3.0.5-r0 do_fetch: Failed to fetch URL git://github.com/htop-dev/htop.git, attempting MIRRORS if available
Currently 8 running tasks (5382 of 7084) 75% |####################### |
Currently 6 running tasks (6040 of 7084) 85% |########################## |
0: cmake-3.20.1-r0 do_compile (pid 3565535) 72% |#################### |
1: boost-1.76.0-r0 do_compile - 24m44s (pid 3578779)
2: kernel-devsrc-1.0-r0 do_install - 15m17s (pid 3619862)
3: gcc-11.1.0-r0 do_package_write_ipk - 1m23s (pid 3665048)
4: libcheck-0.15.2-r0 do_package_write_ipk - 32s (pid 3669480)
5: libsamplerate0-0.1.9-r1 do_package_write_ipk - 24s (pid 3669801)
[1]+ Stopped MACHINE=icicle-kit-es bitbake mpfs-dev-cli
real 328m42.945s
user 0m0.000s
sys 0m0.004s
jaufranc@cnx-laptop-4:~/edev/Microchip/yocto-dev/build$ Поскольку bitbake порождает так много других процессов, мы должны дождаться их завершения. Потребовалось около 10 минут, чтобы вернуться к обычному компьютеру.
Мы приостановили процесс примерно на 3 часа, а потом его можно возобновить командой «fg». Это похоже на режим гибернации для терминальных программ, и он существует всегда, но мы никогда не использовали его. Полная сборка на нашем устройстве заняла от 7 до 8 часов.
Это пространство, используемое Yocto BSP:
~/edev/Microchip/yocto-dev$ du --max-depth=1 -h
313M ./.repo
36M ./meta-openembedded
376K ./meta-polarfire-soc-yocto-bsp
6.3M ./meta-riscv
94G ./build
45M ./openembedded-core
94G .Мы можем найти образ в папке tmp-glibc/deploy/images/icicle-kit-es/:
ls -lh tmp-glibc/deploy/images/icicle-kit-es/
total 9.8G
-rwxr-xr-x 1 jaufranc jaufranc 1.3K Sep 26 18:06 boot.scr.uimg
lrwxrwxrwx 2 jaufranc jaufranc 68 Sep 26 18:07 fitImage -> fitImage--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.bin
-rw-r--r-- 2 jaufranc jaufranc 4.6M Sep 26 18:07 fitImage--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.bin
lrwxrwxrwx 2 jaufranc jaufranc 68 Sep 26 18:07 fitImage-icicle-kit-es.bin -> fitImage--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.bin
-rw-r--r-- 2 jaufranc jaufranc 1.7K Sep 26 18:08 fitImage-its--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.its
lrwxrwxrwx 2 jaufranc jaufranc 72 Sep 26 18:08 fitImage-its-icicle-kit-es -> fitImage-its--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.its
-rw-r--r-- 2 jaufranc jaufranc 4.6M Sep 26 18:08 fitImage-linux.bin--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.bin
lrwxrwxrwx 2 jaufranc jaufranc 78 Sep 26 18:08 fitImage-linux.bin-icicle-kit-es -> fitImage-linux.bin--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.bin
-rw-r--r-- 2 jaufranc jaufranc 11K Sep 26 18:08 microchip-mpfs-icicle-kit--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.dtb
lrwxrwxrwx 2 jaufranc jaufranc 85 Sep 26 18:08 microchip-mpfs-icicle-kit.dtb -> microchip-mpfs-icicle-kit--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.dtb
lrwxrwxrwx 2 jaufranc jaufranc 85 Sep 26 18:08 microchip-mpfs-icicle-kit-icicle-kit-es.dtb -> microchip-mpfs-icicle-kit--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.dtb
lrwxrwxrwx 2 jaufranc jaufranc 38 Sep 26 18:06 mmc-tftp-icicle-kit-es.txt -> mmc-tftp-icicle-kit-es-v2021.04-r0.txt
-rw-r--r-- 2 jaufranc jaufranc 1.2K Sep 26 18:06 mmc-tftp-icicle-kit-es-v2021.04-r0.txt
lrwxrwxrwx 2 jaufranc jaufranc 38 Sep 26 18:06 mmc-tftp.txt -> mmc-tftp-icicle-kit-es-v2021.04-r0.txt
-rw-r--r-- 2 jaufranc jaufranc 1.6M Sep 26 18:08 modules--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.tgz
lrwxrwxrwx 2 jaufranc jaufranc 67 Sep 26 18:08 modules-icicle-kit-es.tgz -> modules--5.12.1+git0+ce6fc289da-r0-icicle-kit-es-20210926061423.tgz
-rw-r--r-- 2 jaufranc jaufranc 5.1K Sep 27 09:29 mpfs-dev-cli.env
-rw-r--r-- 2 jaufranc jaufranc 5.4G Sep 27 09:46 mpfs-dev-cli-icicle-kit-es-20210927021251.rootfs.ext4
-rw-r--r-- 2 jaufranc jaufranc 103K Sep 27 09:27 mpfs-dev-cli-icicle-kit-es-20210927021251.rootfs.manifest
-rw-r--r-- 2 jaufranc jaufranc 5.5G Sep 27 09:50 mpfs-dev-cli-icicle-kit-es-20210927021251.rootfs.wic
-rw-r--r-- 2 jaufranc jaufranc 1.4G Sep 27 09:58 mpfs-dev-cli-icicle-kit-es-20210927021251.rootfs.wic.gz
-rw-r--r-- 2 jaufranc jaufranc 225K Sep 27 09:27 mpfs-dev-cli-icicle-kit-es-20210927021251.testdata.json
lrwxrwxrwx 2 jaufranc jaufranc 53 Sep 27 09:46 mpfs-dev-cli-icicle-kit-es.ext4 -> mpfs-dev-cli-icicle-kit-es-20210927021251.rootfs.ext4
lrwxrwxrwx 2 jaufranc jaufranc 57 Sep 27 09:27 mpfs-dev-cli-icicle-kit-es.manifest -> mpfs-dev-cli-icicle-kit-es-20210927021251.rootfs.manifest
lrwxrwxrwx 2 jaufranc jaufranc 55 Sep 27 09:27 mpfs-dev-cli-icicle-kit-es.testdata.json -> mpfs-dev-cli-icicle-kit-es-20210927021251.testdata.json
lrwxrwxrwx 2 jaufranc jaufranc 52 Sep 27 09:58 mpfs-dev-cli-icicle-kit-es.wic -> mpfs-dev-cli-icicle-kit-es-20210927021251.rootfs.wic
lrwxrwxrwx 2 jaufranc jaufranc 55 Sep 27 09:58 mpfs-dev-cli-icicle-kit-es.wic.gz -> mpfs-dev-cli-icicle-kit-es-20210927021251.rootfs.wic.gz
-rwxr-xr-x 1 jaufranc jaufranc 477K Sep 26 22:30 payload.bin
lrwxrwxrwx 2 jaufranc jaufranc 36 Sep 26 18:06 u-boot.bin -> u-boot-icicle-kit-es-v2021.04-r0.bin
lrwxrwxrwx 2 jaufranc jaufranc 36 Sep 26 18:06 u-boot-icicle-kit-es.bin -> u-boot-icicle-kit-es-v2021.04-r0.bin
-rw-r--r-- 2 jaufranc jaufranc 476K Sep 26 18:06 u-boot-icicle-kit-es-v2021.04-r0.bin
lrwxrwxrwx 2 jaufranc jaufranc 49 Sep 26 18:06 u-boot-mpfs-initial-env -> u-boot-mpfs-initial-env-icicle-kit-es-v2021.04-r0
lrwxrwxrwx 2 jaufranc jaufranc 49 Sep 26 18:06 u-boot-mpfs-initial-env-icicle-kit-es -> u-boot-mpfs-initial-env-icicle-kit-es-v2021.04-r0
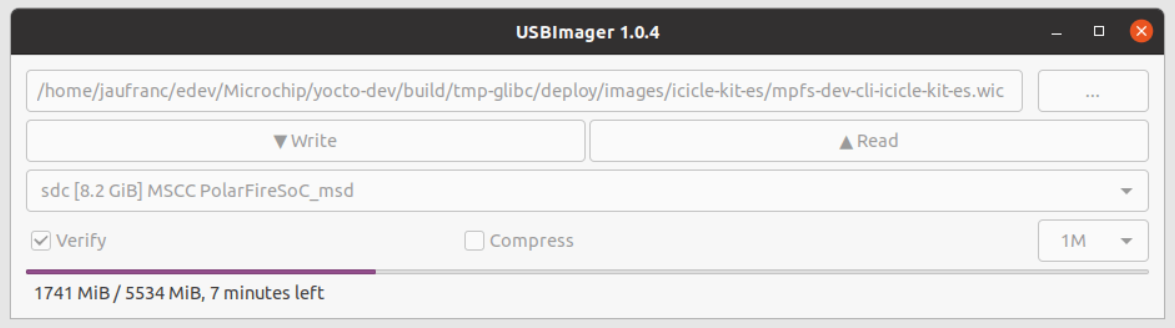
-rw-r--r-- 2 jaufranc jaufranc 3.2K Sep 26 18:06 u-boot-mpfs-initial-env-icicle-kit-es-v2021.04-r0Несжатый образ имеет размер 5,5 ГБ, поэтому его можно разместить на SD-карте 8 ГБ, но рекомендуются карты 16 ГБ или 32 ГБ. Это команда Microchip для прошивки на SD-карту:
zcat tmp-glibc/deploy/images/icicle-kit-es/mpfs-dev-cli-icicle-kit-es.wic.gz | sudo dd of=/dev/sdX bs=4096 iflag=fullblock oflag=direct conv=fsync status=progress
Но если вам нужна проверка образа, предпочтительнее использовать такие утилиты, как USBImager. Это то, что мы использовали для прошивки образа на SD-карту емкостью 32 ГБ, которую затем вставили в слот для SD-карты.
Прервем загрузку, чтобы проверить, обнаружена ли SD-карта:
U-Boot 2021.04 (Sep 26 2021 - 09:16:21 +0000)
CPU: rv64imafdc
Model: Microchip MPFS Icicle Kit
DRAM: 2 GiB
MMC: mmc@20008000: 0
In: serial@20100000
Out: serial@20100000
Err: serial@20100000
Net: eth0: ethernet@20112000
Hit any key to stop autoboot: 0
RISC-V # mmcinfo
Device: mmc@20008000
Manufacturer ID: 0
OEM: 3432
Name: SD16G
Bus Speed: 50000000
Mode: SD High Speed (50MHz)
Rd Block Len: 512
SD version 3.0
High Capacity: Yes
Capacity: 29.1 GiB
Bus Width: 4-bit
Erase Group Size: 512 BytesВсе хорошо, идем дальше… но не получается переключиться на ядро. В конце концов мы пересохранили образ, используя несжатый двоичный файл, и смогли войти в терминал:
root@icicle-kit-es:~# uname -a
Linux icicle-kit-es 5.12.1 #1 SMP Sun Sep 26 08:45:19 UTC 2021 riscv64 riscv64 riscv64 GNU/Linux
root@icicle-kit-es:~# df -g
df: invalid option -- 'g'
Try 'df --help' for more information.
root@icicle-kit-es:~# df -f
df: invalid option -- 'f'
Try 'df --help' for more information.
root@icicle-kit-es:~# df -h
Filesystem Size Used Avail Use% Mounted on
/dev/root 5.2G 4.2G 733M 86% /
devtmpfs 817M 0 817M 0% /dev
tmpfs 818M 0 818M 0% /dev/shm
tmpfs 327M 9.5M 318M 3% /run
tmpfs 4.0M 0 4.0M 0% /sys/fs/cgroup
tmpfs 818M 0 818M 0% /tmp
tmpfs 818M 100K 818M 1% /var/volatile
tmpfs 164M 0 164M 0% /run/user/0
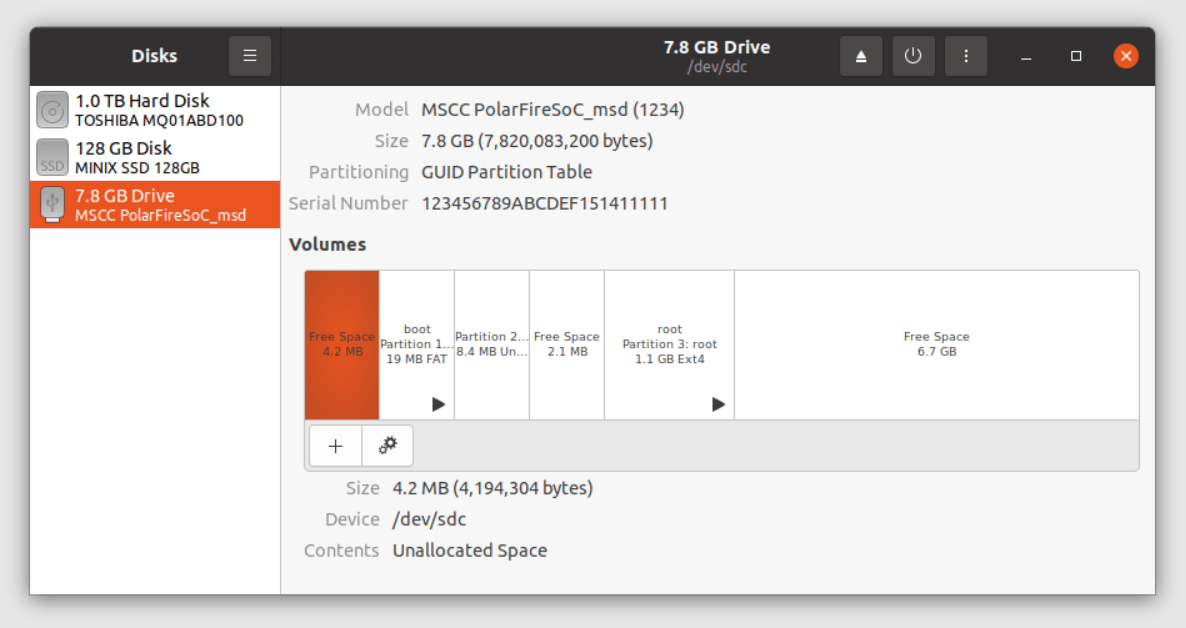
root@icicle-kit-es:~# fdisk -l
GPT PMBR size mismatch (11334293 != 61067263) will be corrected by write.
The backup GPT table is not on the end of the device.
Disk /dev/mmcblk0: 29.12 GiB, 31266439168 bytes, 61067264 sectors
Units: sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disklabel type: gpt
Disk identifier: 707A61C6-0BE8-405E-BF47-9E8071F3EEC9
Device Start End Sectors Size Type
/dev/mmcblk0p1 8192 47009 38818 19M Microsoft basic data
/dev/mmcblk0p2 47010 63393 16384 8M BIOS boot
/dev/mmcblk0p3 65536 11334259 11268724 5.4G Linux filesystemРазмер rootfs не был изменен автоматически, и, похоже, возникла проблема с таблицей GPT… Мы не совсем понимаем, что произошло. Но поскольку наш самодельный образ работает, и у нас есть флеш-память eMMC, давайте сохраним его во внутреннее хранилище.
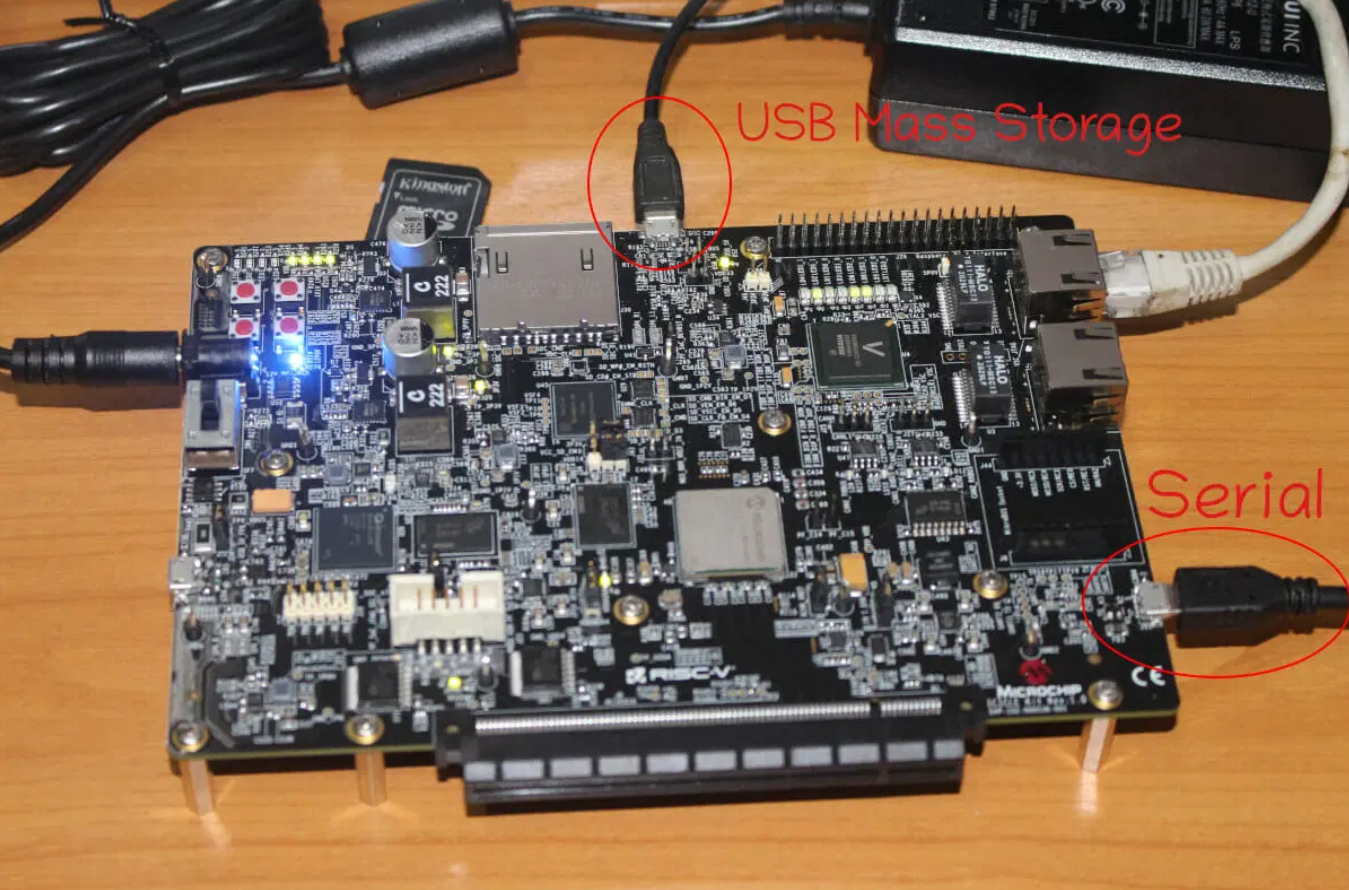
Выключите плату, извлеките SD-карту и подключитесь к ttyUSB0 с помощью Bootterm, чтобы получить доступ к терминалу HSS:
bt ttyUSB0
Перед перезапуском платы, прервав загрузку, введите «usbdmsc», чтобы открыть флэш-память eMMC в качестве USB-накопителя для ноутбука с Ubuntu.
[5.623947] HSS_MMCInit(): Attempting to select eMMC ... Passed
Press a key to enter CLI, ESC to skip
Timeout in 5 seconds
.[6.915522] HSS_ShowTimeout(): Character 32 pressed
[6.921945] HSS_TinyCLI_Parser(): Type HELP for list of commands
[6.929236] HSS_TinyCLI_Parser(): >> usbdmsc
[27.703151] HSS_TinyCLI_Execute(): Unknown command >><<.
[27.710094] HSS_TinyCLI_Parser(): >> usbdmsc
[37.207116] HSS_MMCInit(): Attempting to select SDCARD ... [38.215220] mmc_init_common(): MSS_MMC_init() returned unexpected 0
Failed
[38.223900] HSS_MMCInit(): Attempting to select eMMC ... Passed
Waiting for USB Host to connect... (CTRL-C to quit)
USB Host connected. Waiting for disconnect... (CTRL-C to quit)
664064 bytes written, 21166080 bytes read
Нам понадобится еще один кабель Micro USB, подключенный к порту Micro USB J16, чтобы увидеть флешку в Ubuntu.
Мы можем отключить загрузочный и корневой разделы перед прошивкой образа, как мы это сделали для SD-карты. Сначала мы попытались использовать образ gz, но у нас возникла та же проблема, что и с SD-картой. Корневой раздел не удалось смонтировать даже на ПК, поэтому мы выбрали несжатый образ, и все прошло гладко.
После завершения мы можем отсоединить кабель micro USB, подключенный к J16, и получить доступ к нашему образу Linux …
jaufranc@cnx-laptop-4:~/edev/Microchip/yocto-dev/build$ bt ttyUSB1
Trying port ttyUSB1... Connected to ttyUSB1 at 115200 bps.
Escape character is 'Ctrl-]'. Use escape followed by '?' for help.
icicle-kit-es login: root
root@icicle-kit-es:~# uname -a
Linux icicle-kit-es 5.12.1 #1 SMP Sun Sep 26 08:45:19 UTC 2021 riscv64 riscv64 riscv64 GNU/Linux
root@icicle-kit-es:~# df -h
Filesystem Size Used Avail Use% Mounted on
/dev/root 5.2G 4.2G 733M 86% /
devtmpfs 817M 0 817M 0% /dev
tmpfs 818M 0 818M 0% /dev/shm
tmpfs 327M 9.6M 318M 3% /run
tmpfs 4.0M 0 4.0M 0% /sys/fs/cgroup
tmpfs 818M 0 818M 0% /tmp
tmpfs 818M 100K 818M 1% /var/volatile
tmpfs 164M 0 164M 0% /run/user/0
root@icicle-kit-es:~# Кросс-компиляция «Hello World»
Попробуем кросс-скомпилировать программу «Hello World»
#include <stdio.h>
int main() {
printf("Hello, World!\n");
return 0;
}для RISC-V с помощью набора инструментов Yocto, который мы сначала добавим к нашему пути:
export PATH=$PATH:~/edev/Microchip/yocto-dev/build/tmp-glibc/sysroots-components/x86_64/gcc-cross-riscv64/usr/bin/riscv64-oe-linuxи используем инструмент RISCV GCC для его создания:
riscv64-oe-linux-gcc hello.c -o hello
hello.c:1:10: fatal error: stdio.h: No such file or directory
1 | #include <stdio.h>
| ^~~~~~~~~
compilation terminated.К сожалению, это не работает должным образом. Похоже, что набор инструментов установлен неправильно, или мы использовали не тот инструмент. Мы пытались поработать с CFLAGS, но не повезло … Может, он должен работать только в рамках Yocto/Bitbake … У нас есть опыт работы с buildroot, и обычно инструментальная цепочка кросс-компиляции работает из коробки.
Тест EEMBC CoreMark
Построим EEMBC CoreMark прямо на плате. Созданный нами образ поставляется с git и набором инструментов GNU GCC, поэтому он должен быть простым.
https://github.com/eembc/coremark
cd coremark/
make -j4Это и создает, и запускает CoreMark с двумя сгенерированными файлами.
- run1.log
2K performance run parameters for coremark.
CoreMark Size : 666
Total ticks : 14935
Total time (secs): 14.935000
Iterations/Sec : 1339.136257
Iterations : 20000
Compiler version : GCC11.1.0
Compiler flags : -O2 -DPERFORMANCE_RUN=1 -lrt
Memory location : Please put data memory location here
(e.g. code in flash, data on heap etc)
seedcrc : 0xe9f5
[0]crclist : 0xe714
[0]crcmatrix : 0x1fd7
[0]crcstate : 0x8e3a
[0]crcfinal : 0x382f
Correct operation validated. See README.md for run and reporting rules.
CoreMark 1.0 : 1339.136257 / GCC11.1.0 -O2 -DPERFORMANCE_RUN=1 -lrt / Heap- run2.log
2K validation run parameters for coremark.
CoreMark Size : 666
Total ticks : 14907
Total time (secs): 14.907000
Iterations/Sec : 1341.651573
Iterations : 20000
Compiler version : GCC11.1.0
Compiler flags : -O2 -DPERFORMANCE_RUN=1 -lrt
Memory location : Please put data memory location here
(e.g. code in flash, data on heap etc)
seedcrc : 0x18f2
[0]crclist : 0xe3c1
[0]crcmatrix : 0x0747
[0]crcstate : 0x8d84
[0]crcfinal : 0xd304
Correct operation validated. See README.md for run and reporting rules.Плата набрала 1339,136257 баллов, или около 2,23 CoreMark/МГц, поскольку ядра RISC-V работают на частоте 600 МГц. Но Microchip сообщает на плате 3,25 CoreMark/МГц. Давайте попробуем еще раз с теми же флагами, которые использует компания:
make clean
make XCFLAGS="-O3 -DHAS_STDIO -DHAS_TIME_H -DUSE_CLOCK -fno-common -funroll-loops -finline-functions -falign-functions=16 -falign-jumps=4 -falign-loops=4 -finline-limit=1000 -fno-if-conversion2 -fselective-scheduling -fno-tree-dominator-opts -lpthread -DHAS_FLOAT=0 -mtune=sifive-7-series"
Это содержимое run1.log:
2K performance run parameters for coremark.
CoreMark Size : 666
Total ticks : 12874295
Total time (secs): 12
Iterations/Sec : 1666
Iterations : 20000
Compiler version : GCC11.1.0
Compiler flags : -O2 -O3 -DHAS_STDIO -DHAS_TIME_H -DUSE_CLOCK -fno-common -funroll-loops -finline-functions -falign-functions=16 -falign-jumps=4 -falign-loops=4 -finline-limit=1000 -fno-if-conversion2 -fselective-scheduling -fno-tree-dominator-opts -lpthread -DHAS_FLOAT=0 -mtune=sifive-7-series -DPERFORMANCE_RUN=1 -lrt
Memory location : Please put data memory location here
(e.g. code in flash, data on heap etc)
seedcrc : 0xe9f5
[0]crclist : 0xe714
[0]crcmatrix : 0x1fd7
[0]crcstate : 0x8e3a
[0]crcfinal : 0x382f
Correct operation validated. See README.md for run and reporting rules.Почему-то результат CoreMark нигде нельзя найти, но у нас все еще есть количество итераций в секунду, которое увеличилось с 1341,651573 до 1666. Так что оно улучшилось. Взглянув на код, легко понять, почему рейтинг не отображается:
ee_printf(
"Correct operation validated. See README.md for run and reporting "
"rules.\n");
#if HAS_FLOAT
if (known_id == 3)
{
ee_printf("CoreMark 1.0 : %f / %s %s",
default_num_contexts * results[0].iterations
/ time_in_secs(total_time),
COMPILER_VERSION,
COMPILER_FLAGS);Давайте повторим это с -DHAS_FLOAT = 1…
make clean make XCFLAGS="-O3 -DHAS_STDIO -DHAS_TIME_H -DUSE_CLOCK -fno-common -funroll-loops -finline-functions -falign-functions=16 -falign-jumps=4 -falign-loops=4 -finline-limit=1000 -fno-if-conversion2 -fselective-scheduling -fno-tree-dominator-opts -lpthread -DHAS_FLOAT=1 -mtune=sifive-7-series"
На этот раз все выглядит правильно:
2K performance run parameters for coremark.
CoreMark Size : 666
Total ticks : 12842191
Total time (secs): 12.842191
Iterations/Sec : 1557.366652
Iterations : 20000
Compiler version : GCC11.1.0
Compiler flags : -O2 -O3 -DHAS_STDIO -DHAS_TIME_H -DUSE_CLOCK -fno-common -funroll-loops -finline-functions -falign-functions=16 -falign-jumps=4 -falign-loops=4 -finline-limit=1000 -fno-if-conversion2 -fselective-scheduling -fno-tree-dominator-opts -lpthread -DHAS_FLOAT=1 -mtune=sifive-7-series -DPERFORMANCE_RUN=1 -lrt
Memory location : Please put data memory location here
(e.g. code in flash, data on heap etc)
seedcrc : 0xe9f5
[0]crclist : 0xe714
[0]crcmatrix : 0x1fd7
[0]crcstate : 0x8e3a
[0]crcfinal : 0x382f
Correct operation validated. See README.md for run and reporting rules.
CoreMark 1.0 : 1557.366652 / GCC11.1.0 -O2 -O3 -DHAS_STDIO -DHAS_TIME_H -DUSE_CLOCK -fno-common -funroll-loops -finline-functions -falign-functions=16 -falign-jumps=4 -falign-loops=4 -finline-limit=1000 -fno-if-conversion2 -fselective-scheduling -fno-tree-dominator-opts -lpthread -DHAS_FLOAT=1 -mtune=sifive-7-series -DPERFORMANCE_RUN=1 -lrt / Heap
Но это всего лишь 2,59 CoreMark/МГц, все еще не до 3,125 CoreMark/МГц. Фактически, он соответствует результатам Microchip с использованием беззнакового индекса. Кто-то пытался сделать то же самое, и ему посоветовали изменить код в posix/core_portme.h, чтобы использовать индекс со знаком:
typedef signed int ee_u32;После повторного запуска теста результат стал еще выше:
2K performance run parameters for coremark.
CoreMark Size : 666
Total ticks : 16767651
Total time (secs): 16.767651
Iterations/Sec : 1789.159376
Iterations : 30000
Compiler version : GCC11.1.0
Compiler flags : -O2 -O3 -DHAS_STDIO -DHAS_TIME_H -DUSE_CLOCK -fno-common -funroll-loops -finline-functions -falign-functions=16 -falign-jumps=4 -falign-loops=4 -finline-limit=1000 -fno-if-conversion2 -fselective-scheduling -fno-tree-dominator-opts -lpthread -DHAS_FLOAT=1 -mtune=sifive-7-series -DPERFORMANCE_RUN=1 -lrt
Memory location : Please put data memory location here
(e.g. code in flash, data on heap etc)
seedcrc : 0xe9f5
[0]crclist : 0xe714
[0]crcmatrix : 0x1fd7
[0]crcstate : 0x8e3a
[0]crcfinal : 0x5275
Correct operation validated. See README.md for run and reporting rules.
CoreMark 1.0 : 1789.159376 / GCC11.1.0 -O2 -O3 -DHAS_STDIO -DHAS_TIME_H -DUSE_CLOCK -fno-common -funroll-loops -finline-functions -falign-functions=16 -falign-jumps=4 -falign-loops=4 -finline-limit=1000 -fno-if-conversion2 -fselective-scheduling -fno-tree-dominator-opts -lpthread -DHAS_FLOAT=1 -mtune=sifive-7-series -DPERFORMANCE_RUN=1 -lrt / Heap
1789,159376 CoreMark соответствует примерно 2,98 CoreMark МГц. Мы можем окончательно взломать устройство, определив HAS_FLOAT = 0 в командной строке make. Результат будет следующим:
2K performance run parameters for coremark.
CoreMark Size : 666
Total ticks : 16694339
Total time (secs): 16
Iterations/Sec : 1875
Iterations : 30000
Compiler version : GCC11.1.0
Compiler flags : -O2 -O3 -DHAS_STDIO -DHAS_TIME_H -DUSE_CLOCK -fno-common -funroll-loops -finline-functions -falign-functions=16 -falign-jumps=4 -falign-loops=4 -finline-limit=1000 -fno-if-conversion2 -fselective-scheduling -fno-tree-dominator-opts -lpthread -DHAS_FLOAT=0 -mtune=sifive-7-series -DPERFORMANCE_RUN=1 -lrt
Memory location : Please put data memory location here
(e.g. code in flash, data on heap etc)
seedcrc : 0xe9f5
[0]crclist : 0xe714
[0]crcmatrix : 0x1fd7
[0]crcstate : 0x8e3a
[0]crcfinal : 0x5275
Correct operation validated. See README.md for run and reporting rules.Если использовать результат Iterations/Sec: 1875 в качестве значения CoreMark 1.0, и в этом случае мы действительно можем достичь точно 3,125 CoreMark/MHz, как это сделал Microchip для использования индекса со знаком. У нас нет уверенности в том, почему signed намного быстрее, чем unsigned … и нам нужно будет посмотреть на сборку и проверить количество циклов для каждой инструкции, чтобы узнать.
Но все это показывает, как можно настраивать/манипулировать тестами для достижения лучших результатов, а также важность флагов компиляции для оптимизации кода. Веб-страница аналитики напряжения/тока не показала каких-либо значительных изменений во время тестирования.
На сегодня это все, а через несколько недель мы, надеемся, опубликуем что-нибудь о FPGA. Кто-то попросил нас оценить стандартизированный интерфейс virt-io по шине PCI-e, но из-за нехватки времени мы не смогли этого сделать. Мы задали это вопрос представителям компании Microchip и нам ответили, что все должно работать, но они не тестировали его …
Если вас интересует плата, ее можно приобрести у различных дистрибьюторов, таких как Mouser, по цене менее 500 долларов.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.