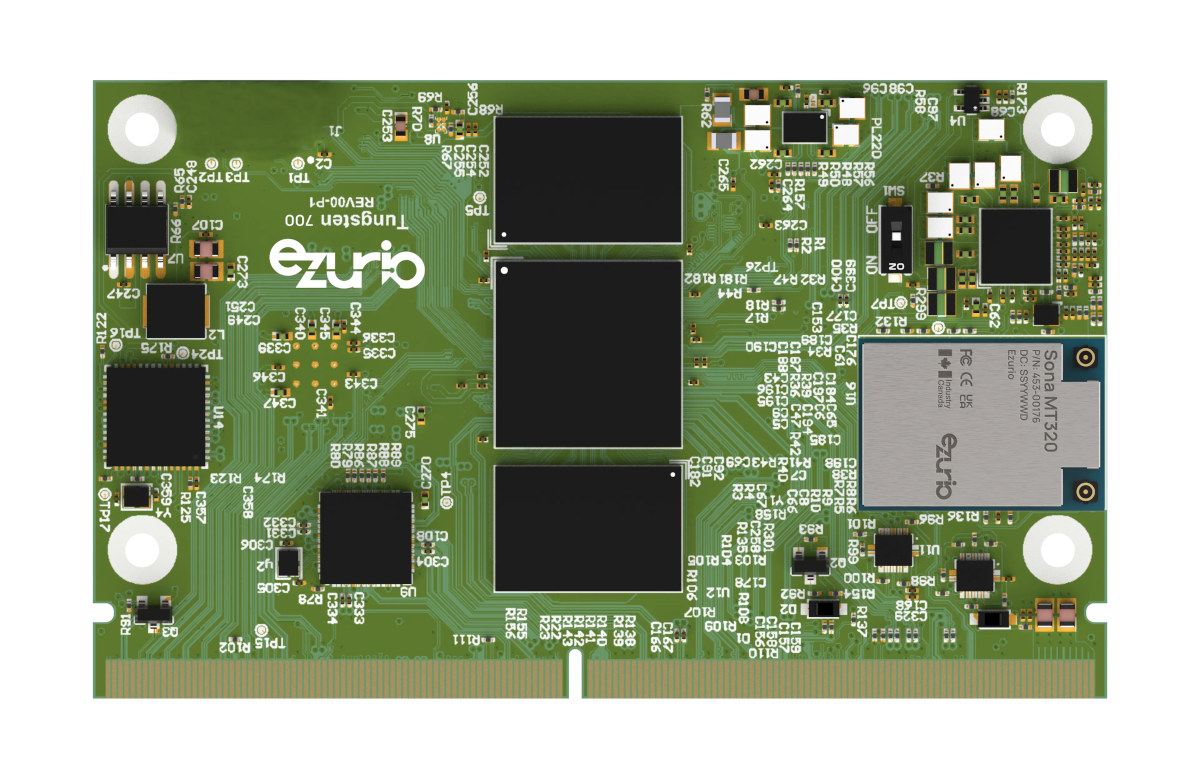
Системные модули Ezurio Tungsten 510 и Tungsten 700, соответствующие стандарту SMARC 2.1, на базе AIoT систем на кристалле MediaTek Genio 510 (шестиядерный) и Genio 700 (восьмиядерный) с ядрами Cortex-A78/A55 и NPU до 4 TOPS.
Модули SMARC оснащены памятью 4 или 8 ГБ LPDDR4 и флеш-памятью 16 ГБ по умолчанию (с возможностью увеличения до 128 ГБ), предлагают два порта Gigabit Ethernet, подключение WiFi 6 и Bluetooth 5.2, а также различные интерфейсы, выведенные через стандартный 314-контактный MXM-разъем, включая интерфейсы дисплея HDMI, DisplayPort, eDP и MIPI DSI, два интерфейса камеры MIPI CSI, два аудиоинтерфейса I2S, PCIe Gen2 x1 и другие.