
Mini π от High Torque Robotics — это двуногий робот высотой 54 см, который может ходить и танцевать на двух ногах и использует возможности одноплатного компьютера Orange Pi 5, такие как ускоритель искусственного интеллекта 6 TOPS в процессоре Rockchip RK3588S.
Робот обладает 12 степенями свободы (DOF) и может бегать, прыгать и даже переворачиваться благодаря двенадцати шарнирным двигателям, разработанным компанией. Mini π предназначен для исследования и обучения алгоритмам локомоции и поддерживает ZMP (zero moment point), MPC (Model Predictive Control), алгоритмы управления локомоцией с обучением с подкреплением и функции навигации ROS SLAM.

Основные характеристики двуногого робота Mini π:
- SBC – Orange Pi 5 RK3588S одноплатный компьютер
- Контроллер – специально разработанный «высокопроизводительный базовый контроллер», использующий 4x CAN FD-коммуникацию
- DOF – 6 DoF на ногу, или всего 12
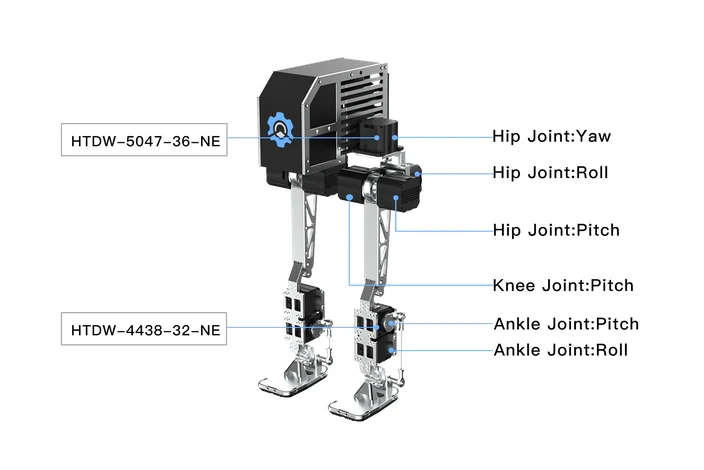
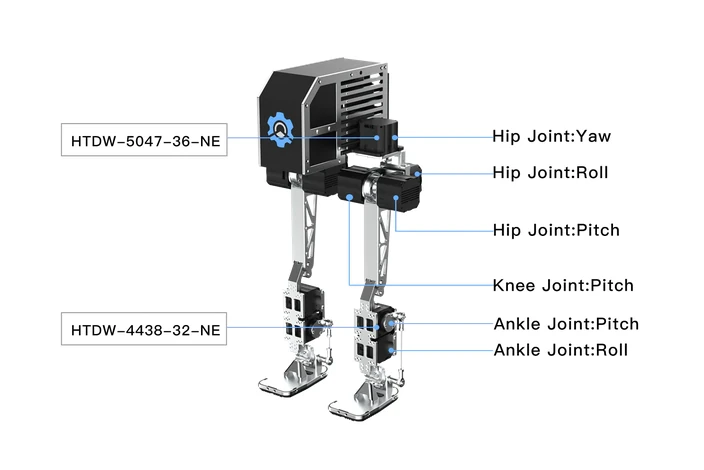
- Совместные двигатели
- 8x HTDM-5047-36-NE с передаточным числом: 36, максимальный крутящий момент 16 Нм
- 4x HTDM-4438-32-NW с передаточным числом: 32, максимальный крутящий момент 6 Нм
- Скорость движения – 1,5м/с
- Высота прыжка – до 2 см.
- Полезная нагрузка – до 5 кг
- Датчик – «Высокопроизводительный ИИБ»
- Рабочее напряжение – 24 В
- Высота стоя – 542 мм
- Вес – 7 кг с аккумулятором
{kind=link}
Говорят, что робот также поставляется с испытательным стендом и переносным кейсом для тележки, а компания предоставляет и ROS 2 SDK. Мы были разочарован отсутствием документации о роботе. Я узнал об этом только тогда, когда Orange Pi перепостил его на X и нашел страницу проекта Hackster.io с несколькими дополнительными подробностями, в частности, об использовании Orange Pi 5 SBC и платы управления с четырьмя интерфейсами CAN FD. На странице Hackster.io также есть дополнительная информация о двигателях сочленений.
Также сообщается, что робот поставляется с тестовым стендом и портативной тележкой, а компания предоставляет ROS 2 SDK. Мы были разочарованы отсутствием документации о роботе. Мы узнали об этом только тогда, когда нашли страницу проекта Hackster.io с более подробной информацией, в частности, об использовании Orange Pi 5 SBC и платы управления с четырьмя интерфейсами CAN FD. Тот самый Hackster.io на странице также есть более подробная информация о совместных двигателях.
High Torque Robotics заявляет, что робот имеет открытый исходный код, но это означает, что алгоритмы движения имеют открытый исходный код с кодом, доступным на GitHub , а не сам робот. Приложения кажутся ограниченными, хотя вы также можете добавить роботизированную руку сверху, поскольку она может поддерживать до 5 кг полезной нагрузки.
— High Torque Robotics (@HTrobotics) 5 июля 2024 г.
Двуногий робот Mini π теперь доступен в трех версиях:
- 7600 долларов за «Базовую конфигурацию управления движением»
- 8711 долларов за «Базовую конфигурацию платы управления движением» (понятия не имею, что это значит).
- 11 950 долларов за «Конфигурацию версии восприятия (Orin + Основной блок управления + IMU)», которая, как я полагаю, заменяет Orange Pi 5 на комплект разработчика NVIDIA Jetson Orin в двуногом роботе.
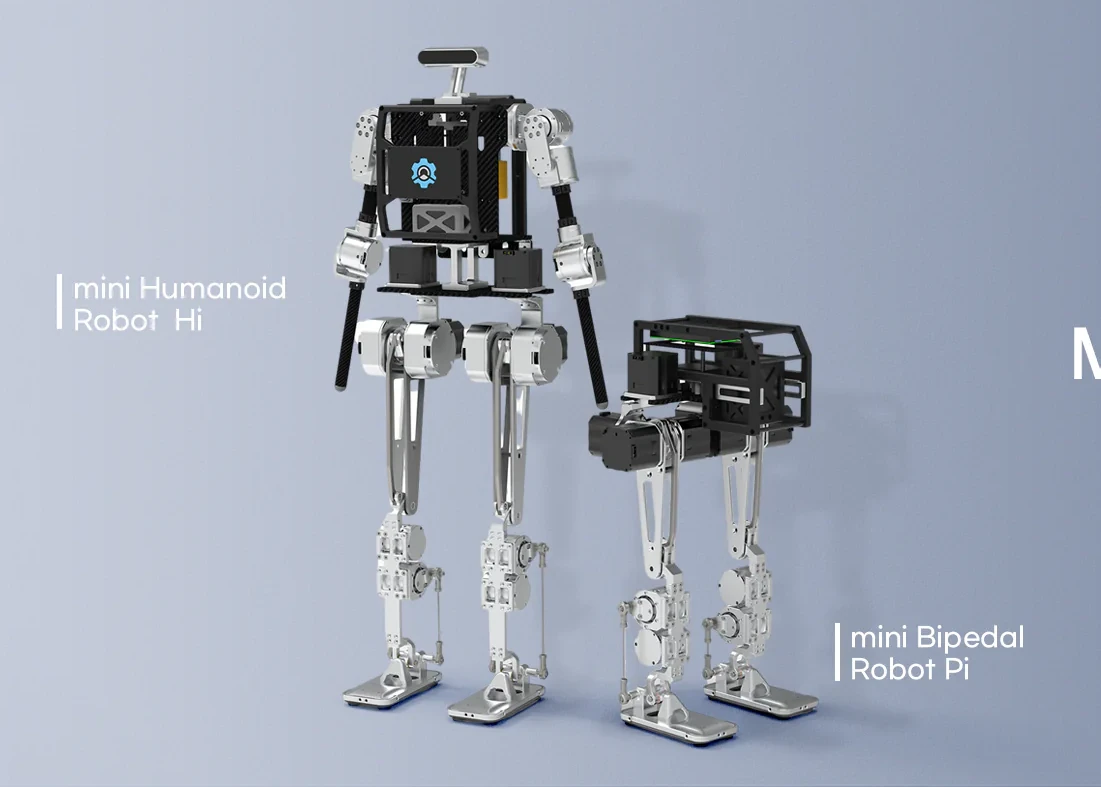
Надеюсь, они улучшат веб-сайт и документацию… Компания также работает над небольшим (высотой 68,5 см) гуманоидным роботом, использующим свои сочлененные двигатели.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.