
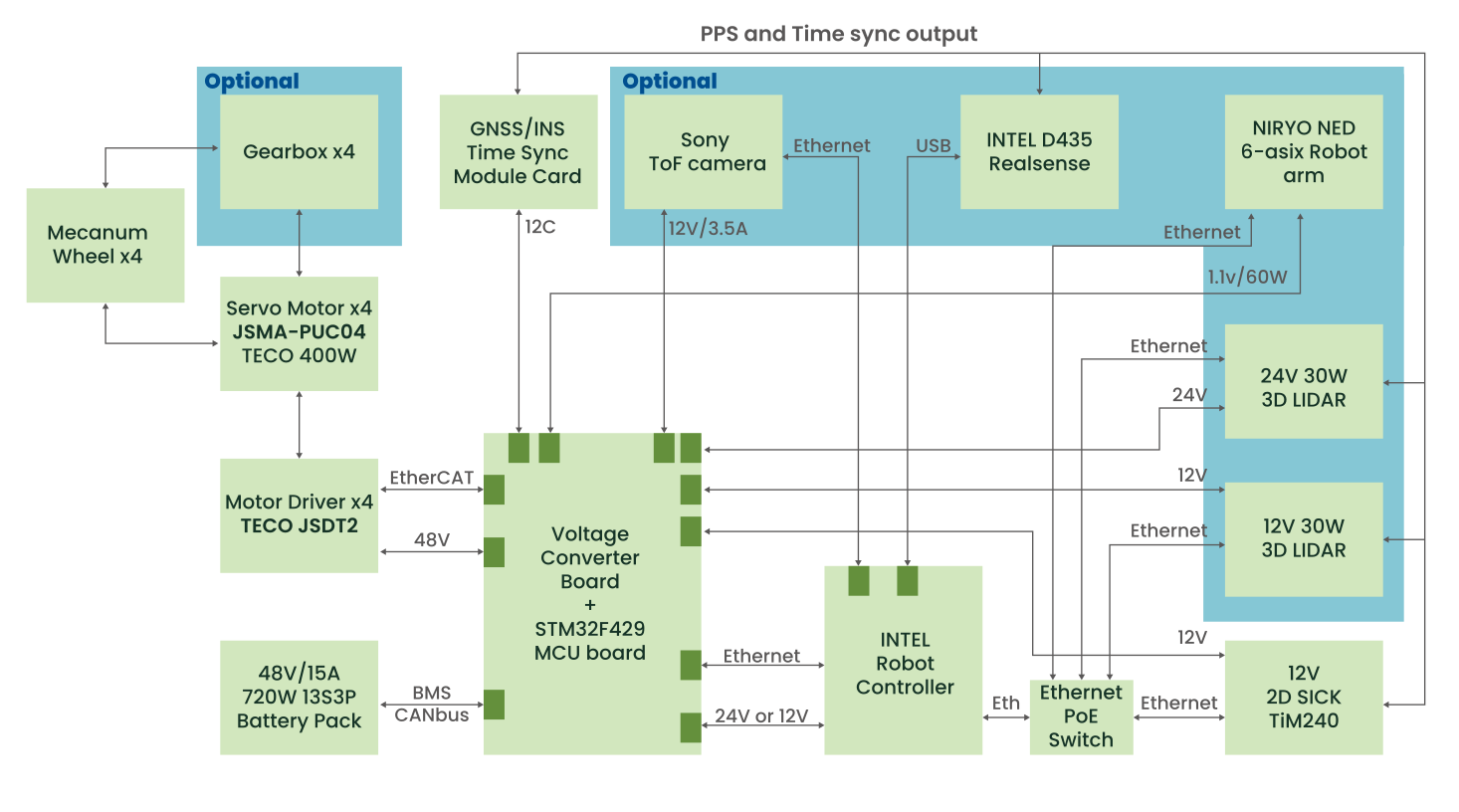
Syncbotic Syncbot — это четырехколесная платформа автономного мобильного робота (AMR) для исследований и обучения, которая может быть оснащена контроллером NVIDIA Xavier NX или Intel Apollo Lake/Tiger Lake под управлением операционной системы Ubuntu 20.04 с платформой ROS 2 и поставляется с платой MCU управления движением с ведущим устройством EtherCat и работающей Zephyr OS.
Робот оснащен четырьмя серводвигателями TECO мощностью 400 Вт, может выдерживать полезную нагрузку до 80 кг для датчиков и манипулятора, имеет выходную мощность 12 В и 24 В для датчиков, четыре порта USB 3.0, а также может быть оснащен комплектом из восьми камер с камерами Intel RealSense и ToF.’

Спецификации Syncbot AMR:
- Платформа контроллера роботов (одна из)
- Оценочный комплект SyncBotic A100 (Apollo Lake E3940)
- Серия SyncBotic SBC-T800 (Intel Tiger Lake UP3)
- SyncBotic SBC серии W (Intel Tiger Lake UP3, водонепроницаемая версия)
- Серия SyncBotic NSync-200 (NVIDIA NX)
- Размеры – 200 х 190 мм.
- Плата управления движением на базе STM32
- Сеть
- 1х порт 10/100M для ведущего устройства EtherCAT для управления серводвигателем
- 1x 10/100M порт для других предложений
- Интерфейсы CAN-шины
- 1x шина CAN для батареи BMS (4-контактный M12, A-код)
- 1x CAN-шина для других предложений
- Интерфейсы DI/DO — 24 В DI/DO для контроля состояния, монитора
- Интерфейсы ввода-вывода — 2x I2C, 5x PWM GPIO, 2x SPI, 2x UART на клеммной колодке, 1x порт micro USB
- Отладка/программирование — 1x интерфейс USB JTAG
- Выходная мощность — встроенный силовой модуль 48 В 600 Вт и поддержка 4-кратного стабильного выхода 48 В с предохранителем 15 А для серводвигателя (с возможностью увеличения до 1200 Вт)
- Потребляемая мощность — до 48 В/15 А
- Сеть
- Серводвигатель / Драйвер двигателя / Коробка передач
- Драйвер двигателя — 4x драйвер двигателя TECO
- Серводвигатель — 4x серводвигатель TECO 48 В / 400 Вт, 3000 об/мин
- Дополнительный редуктор – 4x редуктор LIMING, передаточное число: 15, 2-ступенчатый с входным фланцем
- Двигатель DI / DO — 6x 24 В DI, 4x 24 В DO, 1x DICOM, 1x DOCOM
- Хост-интерфейс — 4x USB, EtherCAT IN/OUT
- Потребляемая мощность — 48 В постоянного тока, 8 А в непрерывном режиме, 11 А в пусковом режиме
- Датчики роботов
- 2D LIDAR — 1x SICK TiM240 SLAM LiDAR на передней стороне
- Дополнительный 3D LiDAR — 1x Voledyne VLP-16 или Ouster OS0-32 3D LiDAR
- Дополнительная карта SyncBotic TSMC — 1x карта TSMC с 9-осевым IMU + L1 GPS
- Дополнительная камера
- Intel Realsense D435i, D405
- ToF- камера oToBrite, oToCAM500
- Дополнительный робот-манипулятор — образовательный робот-манипулятор NIRYO Ned
- Максимальная полезная нагрузка – 80 кг
- Скорость — от 0,6 м/с до 1 м/с (от 2,1 до 3,6 км/ч)
- Ввод/вывод
- 3x Gigabit Ethernet с разъемами M12
- 4х разъема USB 3.0 Gen1 Type-A
- Разное
- Кнопка питания со светодиодом
- Тревожная кнопка
- Синие светодиоды для контроллера робота и готовности серводвигателя,
- Красный светодиод для аварийного сигнала серводвигателя
- Батарея
- Номинальное напряжение: 48 В постоянного тока; диапазон: от 39 В до 54,6 В, литий-ионный элемент 13S3P LG21700
- Входной/выходной разъем питания —
порт Anderson XT60 BMS 1x CANbus с кодировкой M12 A, 4-контактный
- Выходная мощность
- 2x 11,1 В / 6 А с круглыми разъемами
- 1x 12 В / 2 А с круглым разъемом
- 1x 24 В / 2 А с круглым разъемом
- Вся выходная мощность поддерживает OVP, OCP, защиту от короткого замыкания
- Размеры и вес робота
- Колесо — 4x 5-дюймовые колеса Mecanum
- Длина АМР – 600 мм
- Ширина АМР – 400 мм
- Высота AMR – 200 мм
Зазор AMR – 20 мм - Вес – 20 кг
Вот и вся имеющаяся у нас информация о самом роботе SyncBot, но вы можете найти еще несколько подробностей на сайте компании. Мы узнали о учебном роботе благодаря анонсу контроллера робота AAEON RBX-I2000, который Syncbotic продает как серию SBC-T800. Новый контроллер оснащен процессором Intel Tiger Lake UP3 Core i7/i5/i3/Celeron и аппаратной синхронизацией времени для улучшения совмещения датчиков на двух разъемах с программным сокращением задержки со 100 до 200 мкс до всего 20 нс.
Система управления роботом RBX-I2000 также поставляется с 4-канальными портами синхронизации, каждый из которых поддерживает два канала 9600 бит/с и 115200 бит/с, которые в сочетании со встроенным 9-осевым IMU Xsens MTi-670 и Movella Xsens RTK обеспечивают позиционирование на сантиметровом уровне. По умолчанию он работает под управлением Windows 10 IoT Enterprise, но Linux доступен по запросу. Более подробную информацию можно найти на странице продукта.
Помимо использования в автономном мобильном роботе SyncBot для образования и исследований, AAEON ожидает, что RBX-I2000 будет использоваться в интеллектуальном сельском хозяйстве и горнодобывающей промышленности. Общедоступной информации о ценах на робота или контроллер нет. Но последний должен стоить более одной тысячи долларов, а полностью оборудованный робот — более 10 000 долларов, учитывая, что робот-манипулятор NIRYO Ned выше стоит около 2900 евро.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.