
Компания Holybro представила две новые модели популярного полетного контроллера Pixhawk для беспилотных летательных аппаратов (БПЛА). Pixhawk 6X и Pixhawk 6C используют Cortex-M7 в качестве блока управления полетом (FMU) и Cortex-M3 в качестве процессора ввода-вывода.
Pixhawk 6X основан на открытом стандарте Pixhawk FMUv6x и стандарте шины Pixhawk Autopilot. Обе версии 6X/6C оснащены микроконтроллером H7, состоящим из ядра Arm Cortex-M7 (до 480 МГц) и одного ядра Arm Cortex-M3 (до 72 МГц).

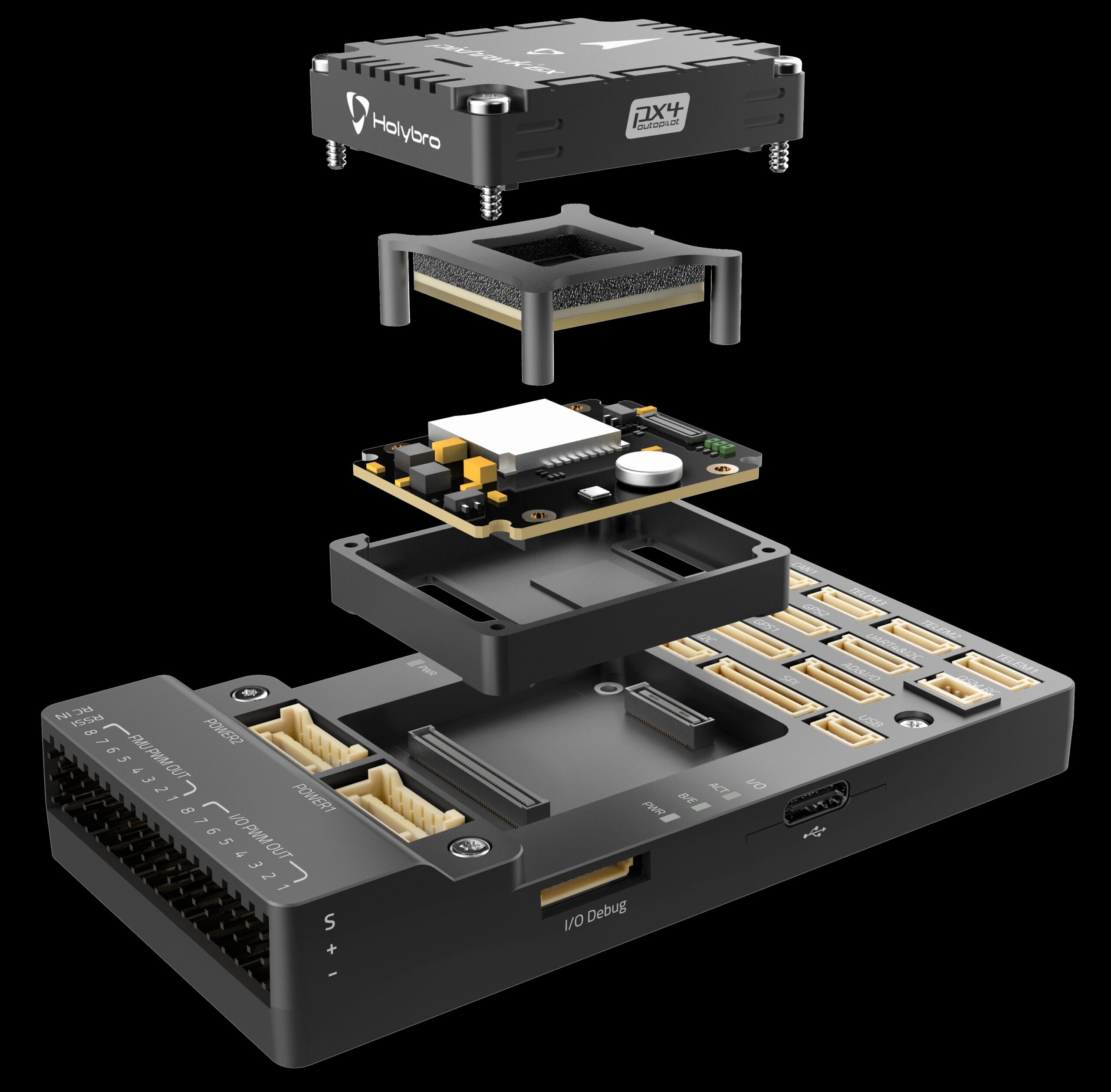
Pixhawk 6X 
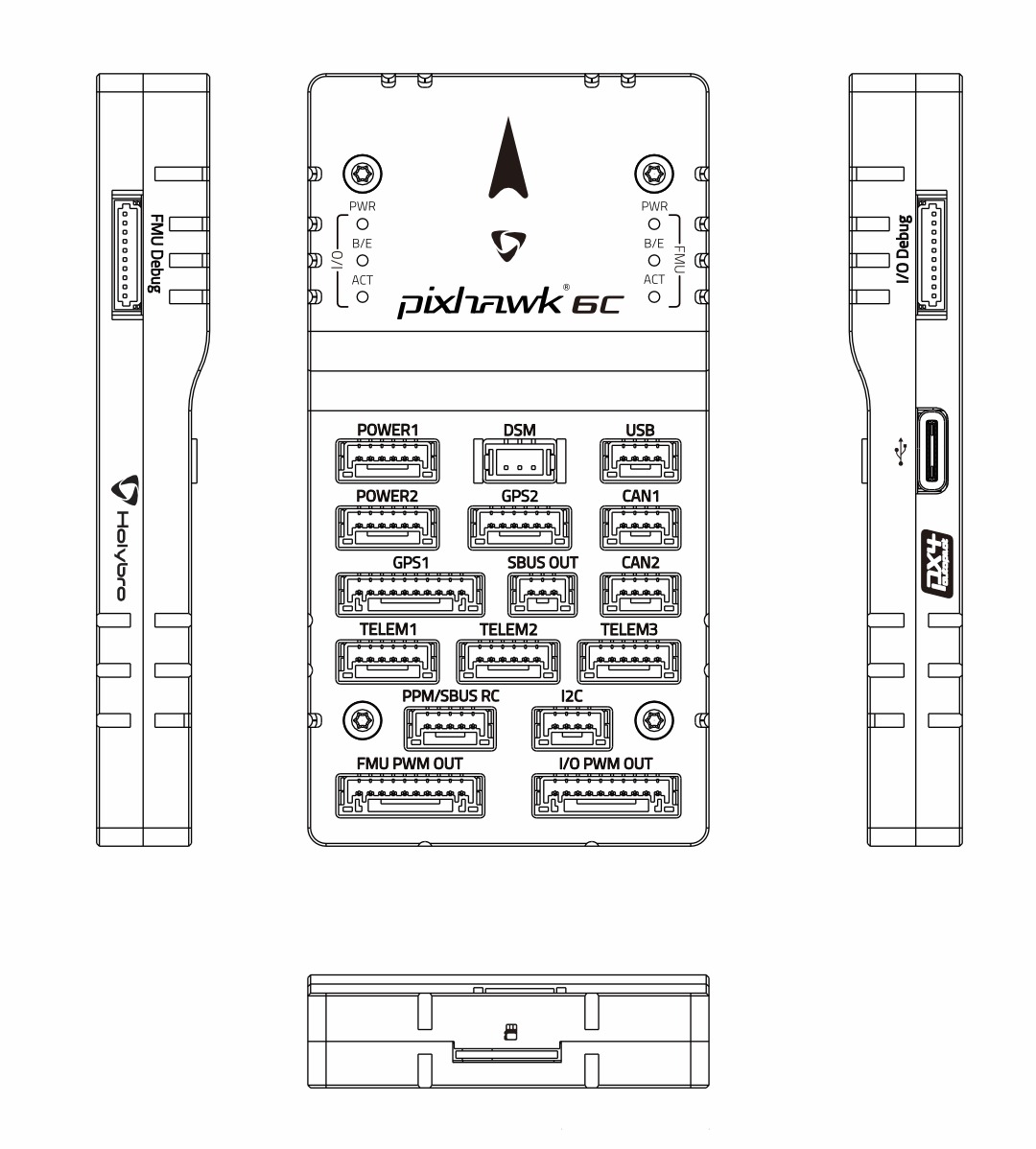
Pixhawk 6C
Модель 6X включает в себя три малошумящих IMU и два датчика барометра, расположенных на отдельных шинах. Если автопилот PX4 обнаружит неисправность датчика, он автоматически переключится на другой, чтобы предотвратить отказ системы. Кроме того, в 6X встроен независимый LDO, который питает каждый датчик с независимым управлением.
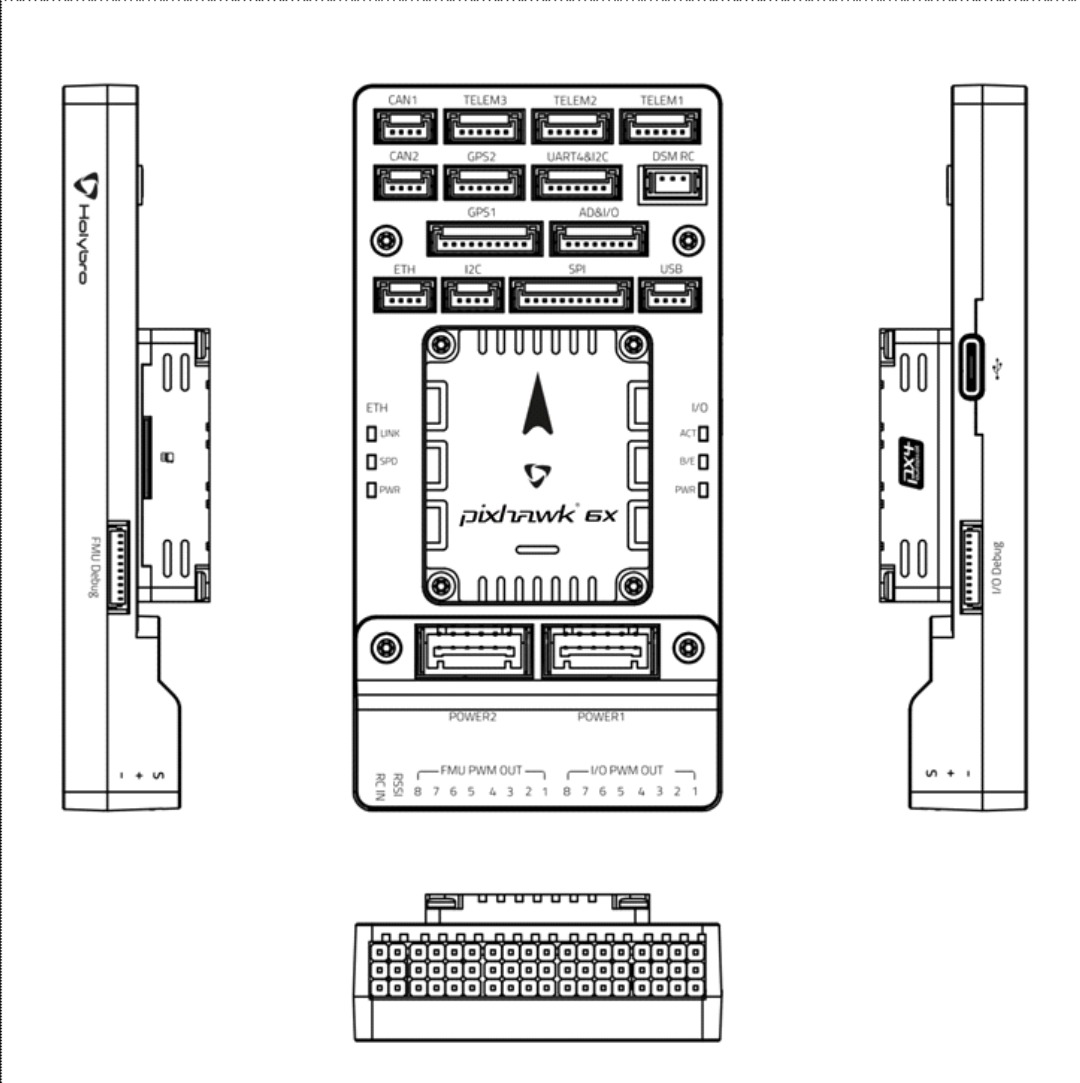
Другие различия между двумя новыми моделями включают поддержку Ethernet и SPI от Pixhawk 6x. Обе версии имеют 2х шины CAN, 16х выходов ШИМ для сервоприводов, 2х порта GPS, порт I2C и многие другие периферийные устройства. Обратитесь к спецификациям ниже для получения дополнительной информации.
По заявлению компании, 6X больше подходит для исследователей или коммерческих приложений, чем 6C, из-за дополнительных IMU и его модульной конструкции. В обеих версиях реализована встроенная система виброизоляции, которая помогает отфильтровывать высокие частоты, вызванные вибрацией, для обеспечения более точных показаний датчика.
Pixhawk 6X поставляется с предустановленным PX4 Ardupilot. Документацию для Pixhawk 6X можно найти здесь и по этой другой ссылке для модели 6C.
Спецификации, перечисленные для Pixhawk 6C, включают:
- Процессорная система:
- процессор STM32H753 с одним 32-битным ядром Arm Cortex-M7 (до 480 МГц)
- процессор STM32F103 с 32-битный ядром Arm Cortex-M3 (до 72 МГц)
- Память/хранилище:
- 1 МБ SRAM (STM32H753)
- 2 МБ флэш-памяти ( STM32F100)
- 64 КБ SRAM (STM32F100)
- Связь:
- 1х порт Ethernet (до 100 Мбит/с)
- 2х порта GPS
- Интерфейсы ввода/вывода:
- 16-PWM сервовыходов
- 3х последовательных порта общего назначения
- Выделенный вход R/C для Spektrum/DSM и SBUS, CPPM, аналоговый/PWM RSSI
- 1xIC2, 2xCAN
- Другие особенности:
- Питание:
- Максимальное входное напряжение 6 В
- 4,75–5,25 В (через USB)
- 0 – вход сервопривода 36 В
- 1,5 А (ограничитель выходного тока Телем1)
- 1,5 А (все остальные порты объединены с ограничителем выходного тока)
- Габаритные размеры:
- 84,8 х 44 х 12,4 мм
- Масса:
- 58,8 г
Спецификации, перечисленные для Pixhawk 6X, включают:
- Процессорная система:
- Память/хранилище:
- 1 МБ SRAM (STM32H753)
- 2 МБ флэш-памяти ( STM32F100)
- 8 КБ SRAM (STM32F100)
- Связь:
- 1х порт Microchip Ethernet (до 100 Мбит/с)
- 2х порта GPS
- Интерфейсы ввода/вывода:
- 16- PWM сервовыходов
- Выделенный аналоговый/PWM вход RSSI и выход SBus
- Выделенный вход R/C для входа PPM и SBus
- 4х последовательных порта общего назначения
- 1x IC2, 1x SPI, 2x CAN
- Вход R/C для Spektrum/DSM
- 2х порта ввода питания с SMBus
- Другие особенности:
- 1x ICM-20649 Accel/Gyro от Invensense
- 1x 42688-P Accel/Gyro от Invensense
- 1x ICM-42670-P Accel/Gyro от Invensense
- 1х магнитометр BMM150 от Bosch
- 2х барометра BMP388 от Bosch
- Питание:
- Максимальное входное напряжение 6 В
- 4,75–5,25 В (через USB)
- 0 – вход сервопривода 36 В
- Ограничитель выходного тока Telem1 1,5 А
- 1,5 А (все остальные порты объединены с ограничителем выходного тока)
- Габаритные размеры:
- 38,8 x 31,8 x 14,6 мм (модуль контроллера полета)
- 52,4 x 103,4 x 16,7 мм (стандартная базовая плата)
- 43,4 x 72,8 x 14,2 мм (мини базовая плата)
Дополнительная информация
Pixhawk 6X доступен за 236,99 долларов на странице продукта Holybro. На момент публикации информации о ценах на версию 6C нет.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту linuxgizmos.com.
Оригинал статьи вы можете прочитать здесь.