
Плата CANPico Canis Labs добавляет шину CAN к Raspberry Pi Pico. Затем аппаратную плату с открытым исходным кодом можно использовать в качестве адаптера CAN, подключенного к хост-компьютеру.
Компания также предоставляет MicroPython SDK с открытым исходным кодом, а также предварительно созданный образ прошивки для быстрого запуска, что позволяет легко контролировать или отслеживать шину CAN с помощью Python.

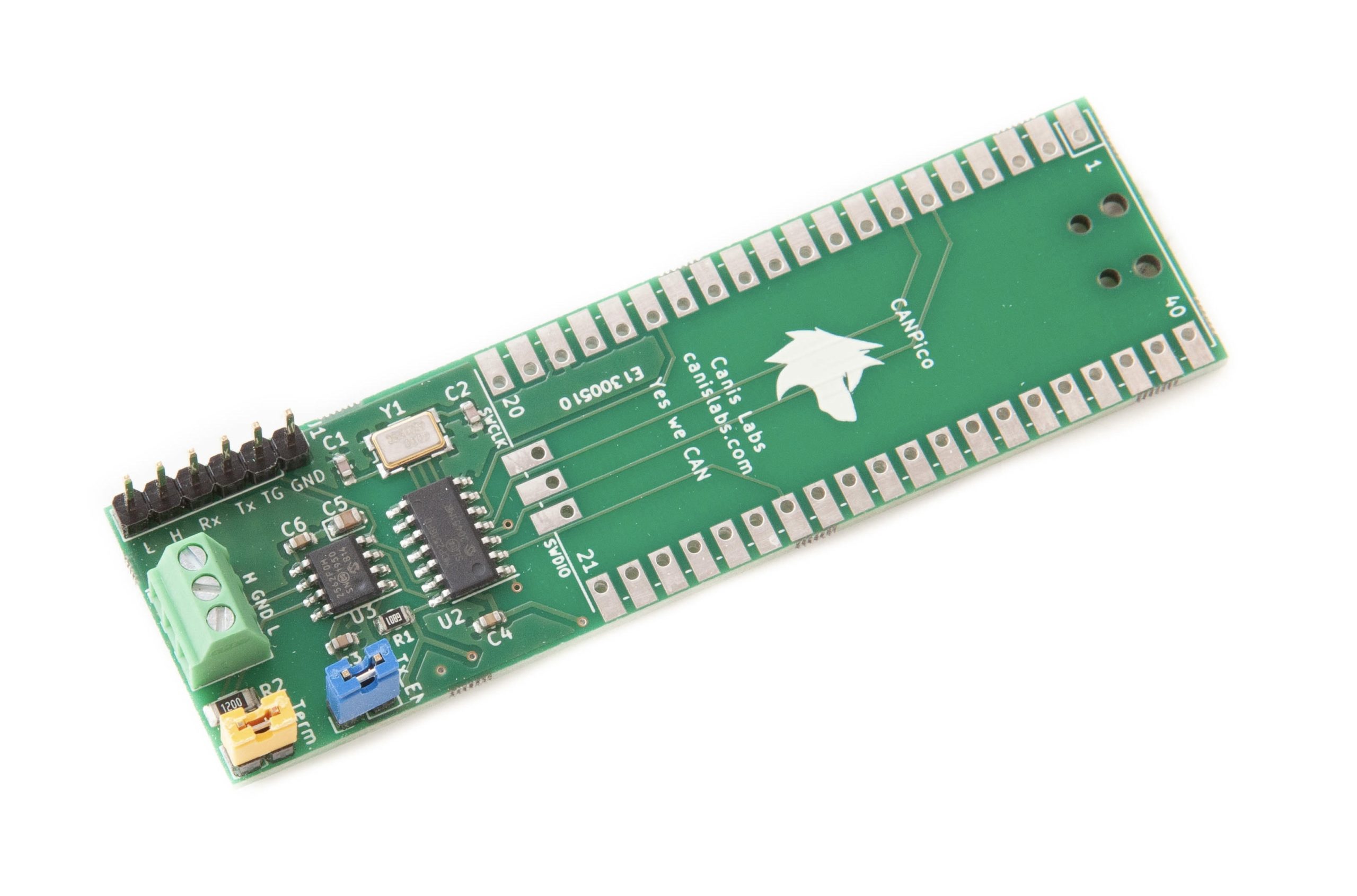
Технические характеристики CANPico:
- MCU — Raspberry Pi Pico с двухъядерным микроконтроллером Cortex-M0 + RP2040
- CAN-интерфейс через 3-контактную клеммную колодку, реализованный через:
- CAN-контроллер Microchip MCP2517 / 18FD (SPI) с буферным пространством 2 Кбайт
- CAN-трансивер Microchip MCP2562FD.
- Разное
- Перемычки для подключения стандартного резистора шины CAN 120 Ом и для отключения доступа передачи к шине CAN
- 6-контактный разъем для логического анализатора или осциллографа, чтобы видеть, что происходит на шине
- Размеры — приблизительно 75 х 24 мм
SDK MicroPython для CANPico содержит два основных API — CAN и CANHack. Он включает драйверы без инверсии приоритета, точную временную метку для Tx и Rx, управление фильтрами CAN ID и упрощенную настройку скорости передачи данных CAN. Вы найдете SDK, файлы проекта KiCAD, а также справочное руководство по оборудованию и справочное руководство MicroPython SDK на Github .
Кен Тинделл, технический директор CANIS Automotive Labs, на видео, представленном ниже, демонстрирует отправку кадров CAN с помощью MicroPython CAN API и логического анализатора с декодером протокола CAN с использованием платы CAN Bus, оснащенной Raspberry Pi Pico.
CANPico продается на SK Pang в Великобритании за 31,90 фунта стерлингов без НДС (45,20 доллара США) с предустановленной на плате Raspberry Pico.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.