
Технология кинематики в реальном времени (RTK) обеспечивает точность позиционирования 1-3 см с данными спутниковых систем позиционирования, таких как GPS, BeiDou, GLONASS, Galileo и NavIC.
Ранее рассматривались модуль Skytraq PX1122R RTK GNSS и инерциальная навигационная система промышленного класса SBG Systems Ellipse-D с этой технологией. Теперь испанская компания ArduSimple представила одноплатный компьютер simpleRTK2B-SBC, призванный упростить разработку решений для сантиметрового позиционирования с поддержкой кинематики в реальном времени (RTK) с использованием до трех приемников GNSS RTK u-blox ZED-F9P.
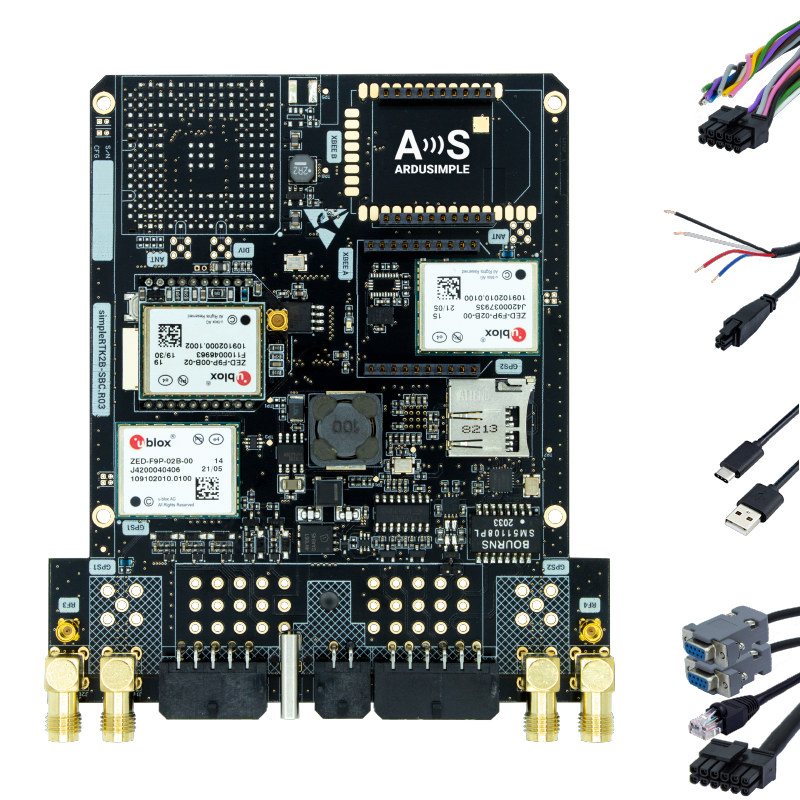
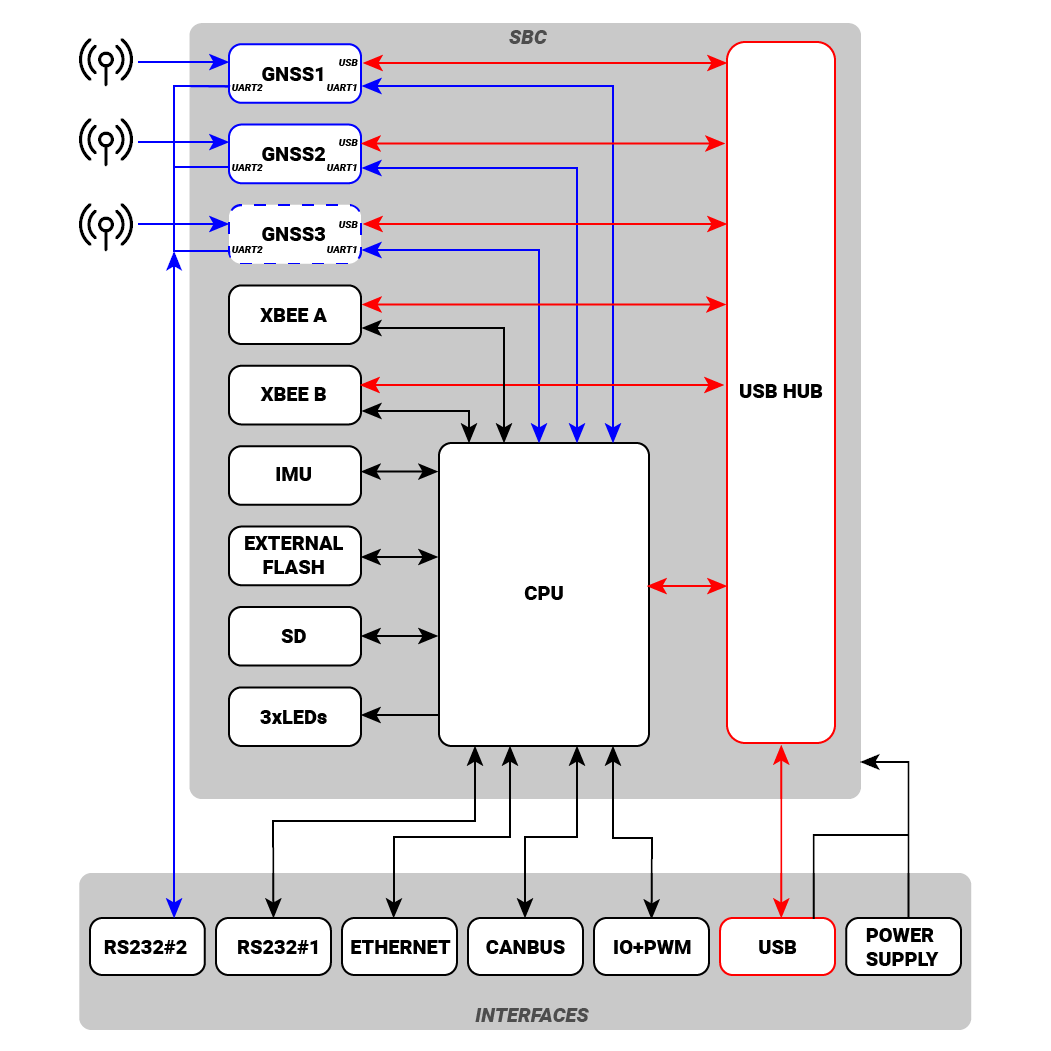
Характеристики и особенности платы simpleRTK2B-SBC:
- Микроконтроллер – STMicro STM32F7 Cortex-M7
- Позиционирование GNSS
- 184-канальный движок u-blox ZED-F9P
- Варианты конфигурации
- 2x ZED-F9P для позиционирования и определения курса
- 3x ZED-F9P для позиционирования и полной ориентации (крен, тангаж, рыскание)
- Частота навигации до 20 Гц
- Точность позиционирования до 1 сантиметра
- GPS: L1 & L2; GLONASS: L1OF & L2OF; Galileo: E1 & E5b; BeiDou: B2I & B2I; QZSS и SBAS
- До 4 интегрированных SMA-разъемов для различных RF-опций
- Гибкость конфигурации – автономный режим, автономный с коррекциями NTRIP, база-ровер, база-несколько роверов, подвижная база RTK
- Поддерживает протоколы связи NMEA, UBX и RTCM, но могут быть добавлены другие
- Память – Опциональная SD-карта для хранения данных
- Опциональная беспроводная связь XBee
- Модем LTE с внешней SIM или интегрированной eSIM
- Радиомодуль UHF 868/900 МГц
- Используется со встроенным NTRIP-транслятором/сервером/клиентом
- Интерфейсы – Двойной RS232, Ethernet, CANBUS, USB и до 8x настраиваемых линий ввода/вывода (GPIO/PWM)
- Опциональный последовательный порт через Bluetooth 2.0
- Датчики – Опциональные ИНС и датчик температуры
- Питание – 7-30В или 5В через USB
- Габариты – 115 x 85 мм с 4 монтажными отверстиями
- Температурный диапазон – -40 +85°C
Производитель предоставляет «готовое ПО», но также можно разработать собственное решение через Micropython API или программировать STM32F7 напрямую на C/C++. Дополнительные детали доступны на сайте документации .
Плата может быть настроена для работы в режимах:
- Автономный режим – Двухдиапазонный приемник GNSS с точностью до метра
- Конфигурация база-ровер – Точность <2 см при максимальной дальности 35 км с использованием двух simpleRTK2B (базовая станция и ровер)
- Конфигурация база-несколько роверов – Точность <1 см при максимальной дальности 35 км от базовой станции с несколькими роверами
- Конфигурация подвижной базы RTK – Точность <1 см и полная система определения ориентации и курса при максимальной дальности 35 км от базовой станции. Требуется одна плата в качестве базовой станции и две/три simpleRTK2B в качестве роверов, установленных на дроне, автомобиле, судне…
- Автономный режим с коррекциями VRS/SSR – Точность <4 см без ограничений по дальности (при наличии покрытия мобильной сети) с использованием одной simpleRTK2B-SBC с 4G или спутниковым модулем в качестве автономного приемника GNSS RTK в сочетании с коррекциями SSR для получения сантиметровой точности.

ArduSimple также предлагает водонепроницаемые и стандартные корпуса, как показано выше.
Хотя стандартный модуль GNSS можно приобрести за $5-$6, оборудование RTK GNSS обычно значительно дороже. Комплект разработки simpleRTK2B-SBC с двумя ZED-F9P стоит 1440 евро, а версия с тремя модулями – 2200 евро в магазине ArduSimple . Корпус добавляет 92 евро. Комплекты также доступны на Aliexpress по схожим ценам.
Следует отметить, что компания также предлагает плату simpleRTK2B (без «SBC» в названии) с одним модулем ZED-F9P за 172,00 евро. Объяснение разницы в цене может содержаться в предыдущем комментарии Xalius :
Помимо стоимости материалов, высокая цена ИНС обусловлена заводской юстировкой и калибровкой систем координат датчиков, созданием корректирующих матриц для обеспечения точных выходных данных. Процедура обычно включает статические, динамические и вибрационно-температурные испытания, занимающие часы для каждого сенсорного узла. Это поднимает стоимость таких ИНС до сотен или тысяч долларов.
Каждый модуль требует индивидуальной калибровки, и сложность процесса, вероятно, возрастает экспоненциально с увеличением количества модулей и датчиков.
Выражаем свою благодарность источнику, с которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.