
Компания Google в самом начале этого года выпустила карты Coral mPCIe и M.2. Карты объединяют 4U TOPS Edge TPU от компании, которые используются для приложений ИИ с низким энергопотреблением, предлагая решения для плат с разъемами mPCIe или M.2.
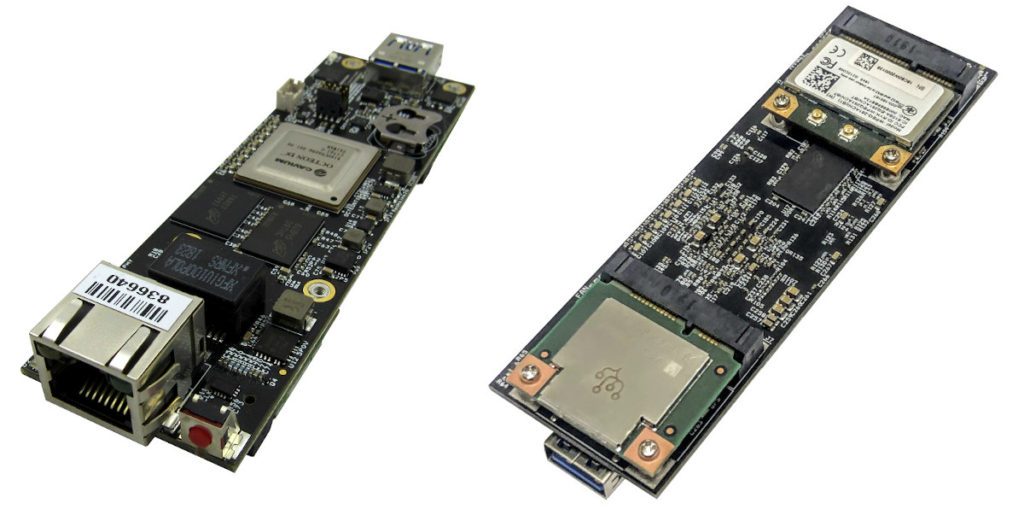
Это всего лишь аппаратные разъемы, которые по выбору подключаются к USB, PCIe, I2C и т. д., поэтому вы должны убедиться, что на вашей плате есть разъем PCIe Gen2 x1. Если вы беспокоитесь о совместимости, было бы хорошо иметь плату, например Gateworks Newport GW6903 SBC, которая предлагает два разъема mPCIe и оснащена двухъядерным или четырехъядерным процессором Marvell Octeon TX Armv8 в сочетании с оперативной памятью до 4 ГБ.
Помимо мини-карты PCIe Coral и Newport SBC, вам также понадобится файл host в Linux и дополнительная веб-камера с разъемом USB для вывода. Остальные инструкции объяснены в Wiki с помощью следующих необходимых шагов:
- Перекомпилируйте ядро Linux с поддержкой видеоустройств и, в частности, веб-камер USB UVC
- Сборка и установка модулей Gasket и Apex (драйверы PCIe для модулей Coral) являются частью исходного кода Coral.
- Установка Python 3.7
- Установка TPU runtime
На этом этапе вы сможете запустить некоторые из образцов в Linux SBC:
- Стандартная демонстрация: классификация образцов с TensorFlow Lite
- Расширенная демонстрация: образец обнаружения видео с веб-камеры с помощью GStreamer
Хочется посмотреть, как работает последний? Посмотрите видео ниже. Примеры фотографий начинаются с отметки 1:39.
У вас будет возможность воспроизвести ту же настройку в любом Linux SBC, работающем под управлением 64-разрядной (Aarch64) Linux и оснащенном мини-разъемом PCIe или M.2 с сигналами PCIe Gen2 x1.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.