
Husarion CORE2 — это плата, предназначенная для упрощения и ускорения разработки робототехнических проектов с использованием предварительно настроенного программного обеспечения и онлайн-управления. Проекты могут начать использовать в компании LEGO, прежде чем перейти к 3D-печатной или вырезанной лазером версии механических деталей, не затрачивая слишком много времени на часть проекта, связанную с электроникой и программным обеспечением.
Платы CORE2 и CORE2-ROS
Доступны две версии платы: CORE2, объединяющий MCM STM32 с модулем Wi-Fi и Bluetooth ESP32, и CORE2-ROS с STM32 подключенные к Raspberry Pi 3 или ASUS Tinkerboard с ROS (операционная система Robot). Оба решения имеют общие характеристики:
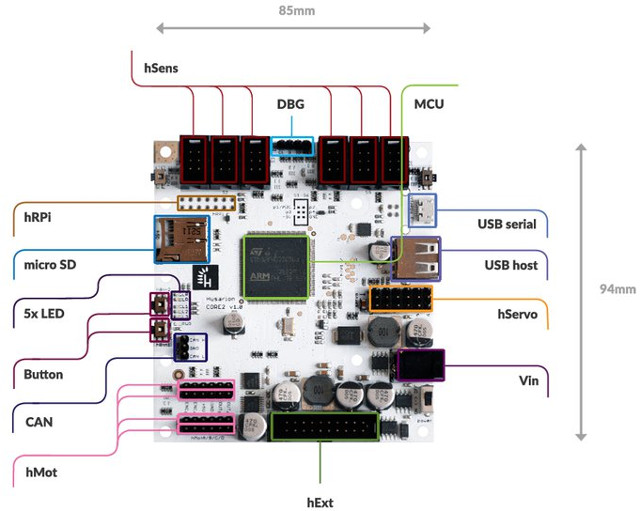
- MCU -STMicro STM32F4 ARM CORTEX-M4 MCU @ 168 МГц с 192 КБ ОЗУ, 1 МБ флэш-памяти
- Внешнее хранилище — 1x микро SD слот
- USB — 1x USB 2.0 хост-порт с возможностью зарядки 1A; 1x порт USB-микро для отладки и программирования через чип FTDI
- Разъемы расширения
- Разъем расширения hRPi для
- CORE2-ROS — одноплатного компьютера Raspberry Pi 3 или ASUS Tinker Board
- CORE2 — Wi-Fi модуль на базе ESP32
- 2x разъема мотора (hMot) с
- 4x DC выхода мотора с встроенными H-мостами
- 4x входа квадратурного энкодера с током на выходе 1 A cont. / 2 A max. (ток 2 А / 4 А при параллельном соединении)
- 6x сервоприводов с возможность выбора напряжения питания (5/6 / 7,4 / 8,6 В) c током для всех сервоприводов вместе 3 A cont./ 4,5 A max.
- 6x 6-контактный hSens sensor порт с GPIO, ADC / ext. interrupt, I2C / UART, выход 5 В
- 1x hExt порт расширения с 12-кратным GPIO, 7-кратным ADC, SPI, I2C, UART, 2 x внешними прерываниями
- Интерфейс 1x CAN с бортовым приемопередатчиком
- Разъем расширения hRPi для
- Отладка — DBG SWD (отладка последовательного интерфейса). Порт отладки STM32F4; порт USB-Micro для последовательной консоли
- Разное — 5x светодиодов, 2x кнопки
- Источник питания — от 6 до 16 В постоянного тока со встроенной защитой от перенапряжения, перенапряжения и обратной полярности
- Размеры — 94 x 85 мм
Что касается программного обеспечения, Husarion предоставляет набор библиотек с открытым исходным кодом для роботов как часть их hFramework , используя каналы DMA и внутреннее прерывание для управления коммуникационными интерфейсами. Компания также подготовила учебники по внедрению ROS, созданию узлов, простой кинематике для мобильного робота, распознаванию визуальных объектов, запуску ROS на нескольких машинах и навигации по SLAM. Плата CORE2 также может программироваться с использованием Arduino IDE, и, наконец, Husarion Cloud позволяет вам безопасно создавать веб-интерфейс пользователя для управления роботом и даже программировать прошивку робота c веб-браузера.
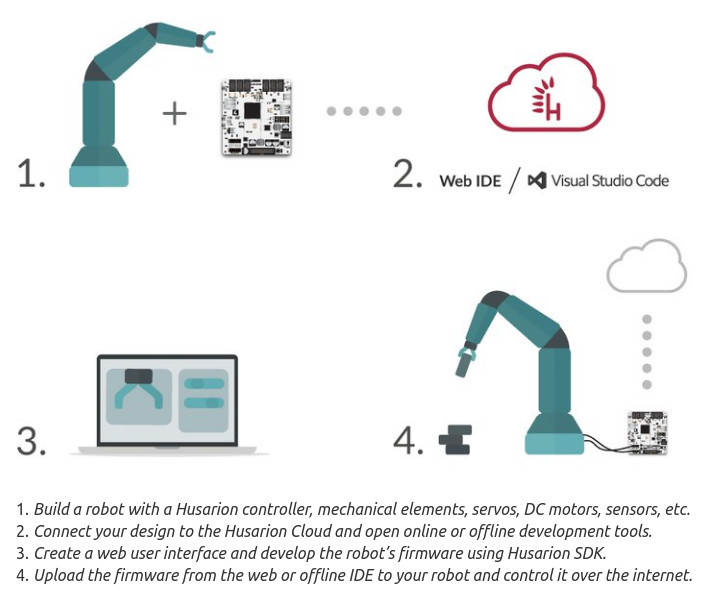
Это означает, что вы можете запрограммировать своего робота, используя либо Web IDE , либо офлайн с помощью SDK плюс Visual Studio Code и расширение Husarion. Поток технической разработки обобщен выше.
Платы CORE2 могут использоваться для различных проектов, таких как роботизированная рука-манипулятор, роботы для телеприсутствия, 3D-принтеры, образовательные роботы, беспилотные летательные аппараты, экзоскелеты и т. д. Если вы хотите узнать о роботах, но не имеете LEGO Mindstorms и не чувствуете себя уверенно, создавая свои собственные механические детали, ROSbot может быть хорошим способом начать работу с платой CORE2-ROS, LiDAR, камерой, четырьмя двигателями постоянного тока с датчиками, датчиком ориентации (MPU9250), четырьмя датчиками расстояния, литий-ионной батареей (3 x 18650 батарей) и зарядным устройством, а также алюминиевой механикой. Это также платформа, которую они используют для своих обучающих программ.

ROSbot
Все эти элементы и дополнительные платы вы сможете найти в кампании CrowdSupply , начиная с 89 долларов США. Для платы CORE2 с модулем ESP32, 99 долларов США. Для платы CORE2-ROS без SBC до 1290 долларов США для полного ROSbot с ASUS Tinker Board. В США доставка бесплатна и от 8 до 20 долларов США, в зависимости от выбранных вознаграждений, с доставкой, запланированной на сентябрь 2017 года, за исключением ROSbot, которая запланирована на середину октября 2017 года.
Оригинал статьи размещен здесь.