
Организация Beagleboard.org уже пыталась запустить платформу BeagleBone BlueSteel-Basic, которая должна была использоваться в одноплатном компьютере, который должен был использоваться для интеграции в их конструкции вместо платформы разработчика BeagleBone Black. По неизвестным причинам этого не случилось, но уже сейчас запускается новая платформа BeagleBone Blue предназначена для робототехники и беспилотных летательных аппаратов.
Технические характеристики BeagleBone Blue:
- Сокет – Texas Instruments Sitara AM3358 Cortex A8 @ 1 ГГц + PowerVR SGX530 GPU
- Оперативная память – 512 Мб DDR3
- Память хранения – 4 Гб 8-бит встроенная flash память
- Связь – WiFi 802.11 b/g/n, Bluetooth 4.0 LE
- USB – USB 2.0 порты, клиент + хост
- Контроль мотора – 8x 6 В серво-выходыservo, 4x DC выхода для подключения моторов, 4x quad enc входа
- Сенсоры – 9 осей IMU, барометр
- “Легкое подключение интерфейсов” – GPS, DSM2 радио, UARTs, SPI, I2C, аналоговые кнопки, светодиоды
- Питание / Батарея – 2-cell LiPo с поддержкой баланса, 6-16 В зарядное устройство
- Размеры – неизвестны
Платформа все еще находится в разработке и единственное изображение которое я нашел, это макет печатной платы.
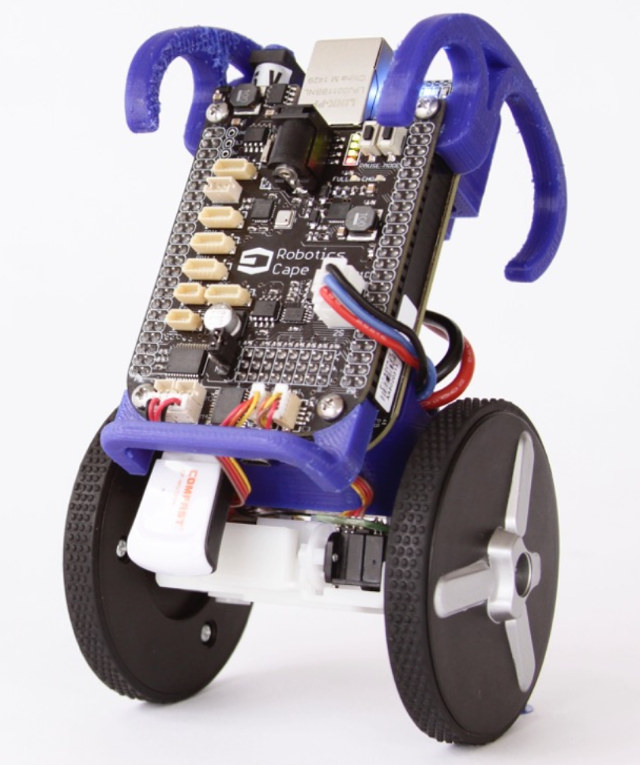
Проект родился благодаря сотрудничеству между Beagleboard.org и University of California San Diego, как показано на первой картинке данного поста в настоящее время они используют BeagleBone Black с Robotics cape и уже началось создание единого бортового компьютера для данного проекта.
BeagleBone Blue будет программно совместим с BeagleBone Black и поддерживает Debian, Ubuntu Snappy, ROS, Ardupilot, Machinekit и т.д… так же поддерживает графику Cloud9 IDE на Node.js, среди прочего. Комплекты показанные в видеоролике: EduMiP безопасно сбалансированный робот, EduRover четырехколесный робот, будет еще третий комплект с названием EduMAV, я думаю это будет “Миниатюрный беспилотник”, например мини дрон/квадрокоптер.
В настоящее время нет информации относительно доступности и цен. Более подробная информация будет размещена на странице BeagleBone Blue по мере развития проекта.
Выражаем свою благодарность источнику с которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.