
Jumperless V5 — это уникальная программируемая макетная плата на базе микроконтроллера Raspberry Pi RP2350B, которая позволяет позволяет вам отказаться от перемычек и перейти сразу к созданию прототипов. Она описывается как «интегрированная среда разработки (IDE) для оборудования». Jumperless V5 также устраняет необходимость в испытательном оборудовании, поскольку поставляется со встроенными источниками питания и может функционировать как мультиметр, осциллограф, генератор функций и логический анализатор.
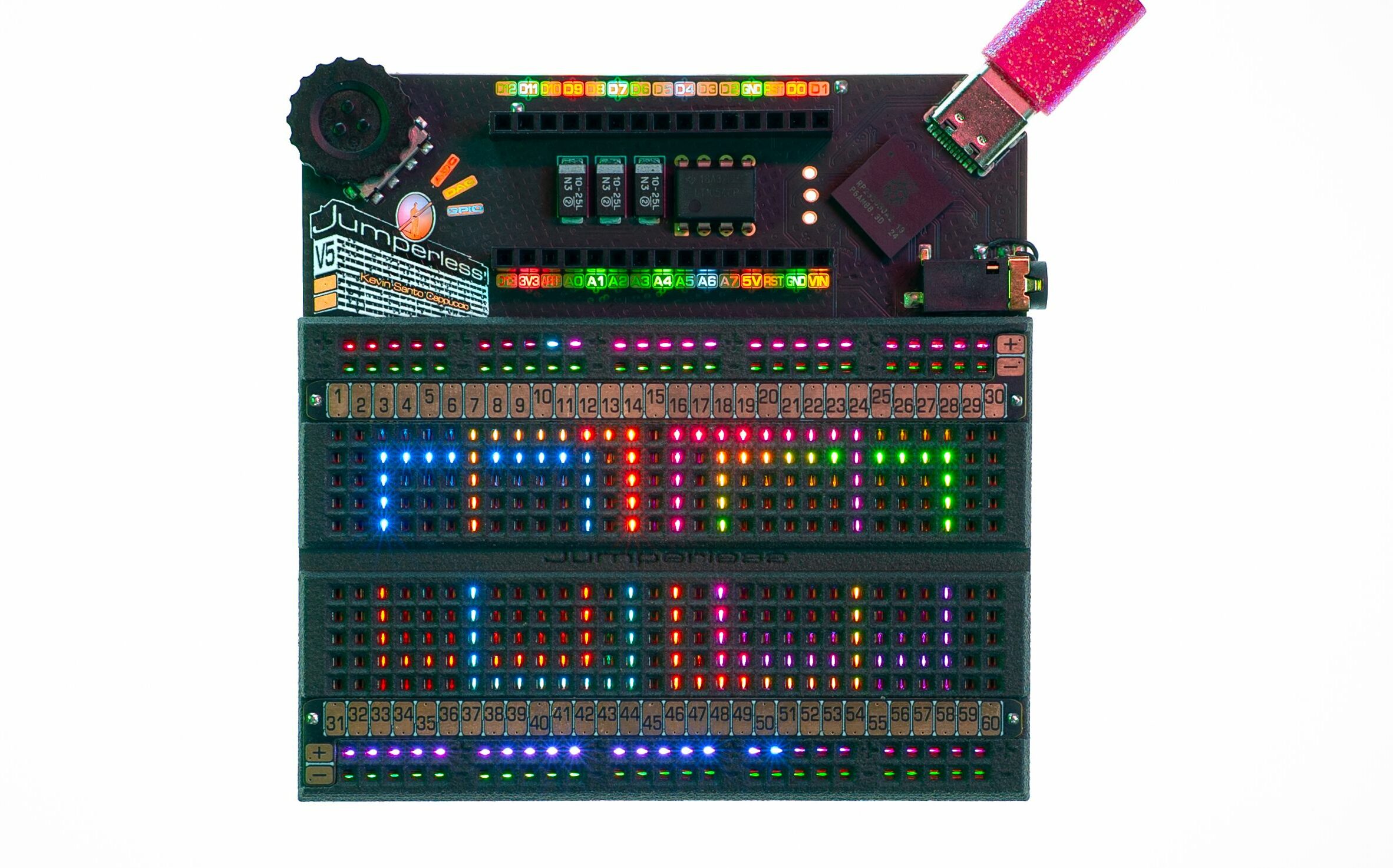
Как следует из названия, макетная плата Jumperless V5 представляет собой обновленную версию оригинальной Jumperless, со значительными улучшениями, которые делают плату более простой в использовании. Jumperless V5 оснащена матричным дисплеем 14 x 30 светодиодов под макетной платой, зондом для выполнения соединений и измерений, четырьмя источниками питания ±8 В, 300 мА, разъемами для последовательного подключения и защитой от перегрузки по току/напряжению.

Зонд V5 без перемычки
Программно-определяемые перемычки позволяют подключать все точки. Четыре индивидуально программируемых источника питания ±8 В, GPIO и каналы управления напряжением, током и сопротивлением могут быть подключены в любом месте на макетной плате или к разъему Arduino Nano.
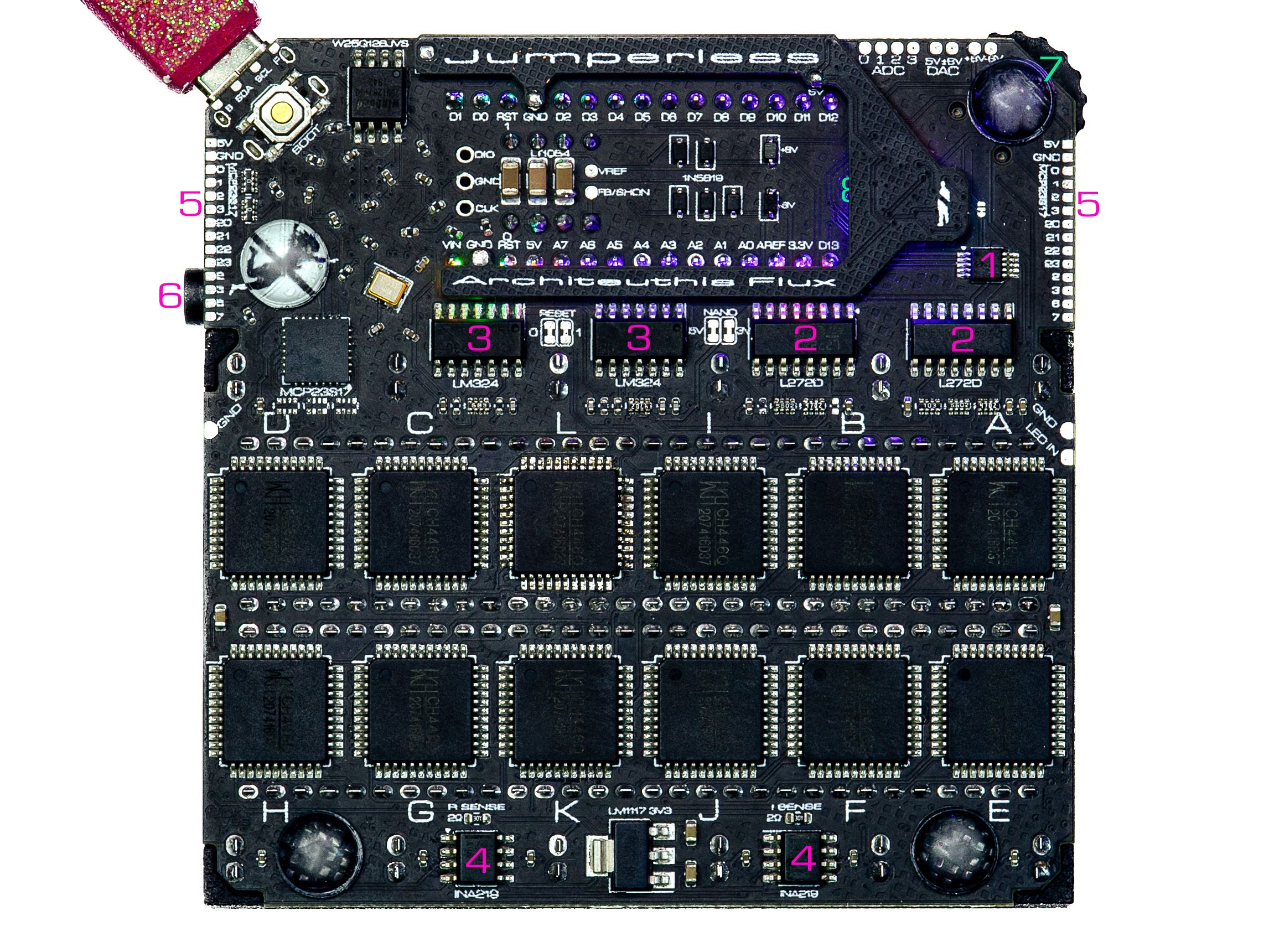
Бесперемычка V5 сзади
Программируемая макетная плата Jumperless V5 поддерживает «опциональную работу без компьютера». Полный контроль осуществляется через последовательный интерфейс терминала, а также через встроенное колесо управления, зонд и светодиоды. Одно ядро Raspberry Pi 2350B обрабатывает основные операции, в то время как другое ядро запускает интерпретатор Python со встроенным модулем для выполнения вызовов функций и выполнения скриптов без внешнего компьютера.
Технические характеристики Jumperless V5:
- Микроконтроллер – Raspberry Pi 2350B, двухъядерный ARM Cortex-M33 или Hazard3 RISC-V @ 150 МГц
- Память – 520 КБ ОЗУ
- Хранилище – встроенная флэш-память объемом 16 МБ
- Дисплей – 451 RGB-светодиод (5 в ряду)
- USB – USB Type-C
- Периферийные устройства
- 4x 12-битных ЦАП (Microchip MCP4278)
- 7x 12-битных АЦП (встроены в RP2350)
- 2x 12-битных датчика тока/напряжения (Texas Instruments INA219)
- 4x 5 В логических входа/выхода GPIO (MCP23S17)
- 6x 3,3 В логических входов/выходов общего назначения (RP2040)
- 2x 14-контактных разъема последовательного соединения для передачи 8 аналоговых сигналов, SPI и питания на другую плату
- Разъем Arduino Nano
- Метод коммутации – аналоговая матрица из 12 коммутаторов CH446Q
- Входной сигнал схемы – постоянно включенный датчик, Wokwi, дисковый переключатель, терминал, маршрутизируемый UART, текстовый файл, Python
- Измерение – напряжение, ток, сопротивление, частота, цифровые данные
- Выходная мощность
- Шины питания – индивидуально регулируемые ±8 В 300 мА
- Напряжение – от -9 В до +9 В (с защитой от перенапряжения)
- Разное – Поворотный энкодер/переключатель, зонд (TRRS)
- Размеры – будут объявлены позже
Проекты можно загружать на плату Jumperless V5 через USB. Они хранятся в виде текстовых файлов на 16 МБ флэш-памяти платы и сохраняются в библиотеке приложений для запуска в любое время. Jumperless V5 также принимает команды от UART через разъем Arduino Nano. Настольное приложение может выполнять обновления прошивки и опрашивать проекты Wokwi на предмет изменений.
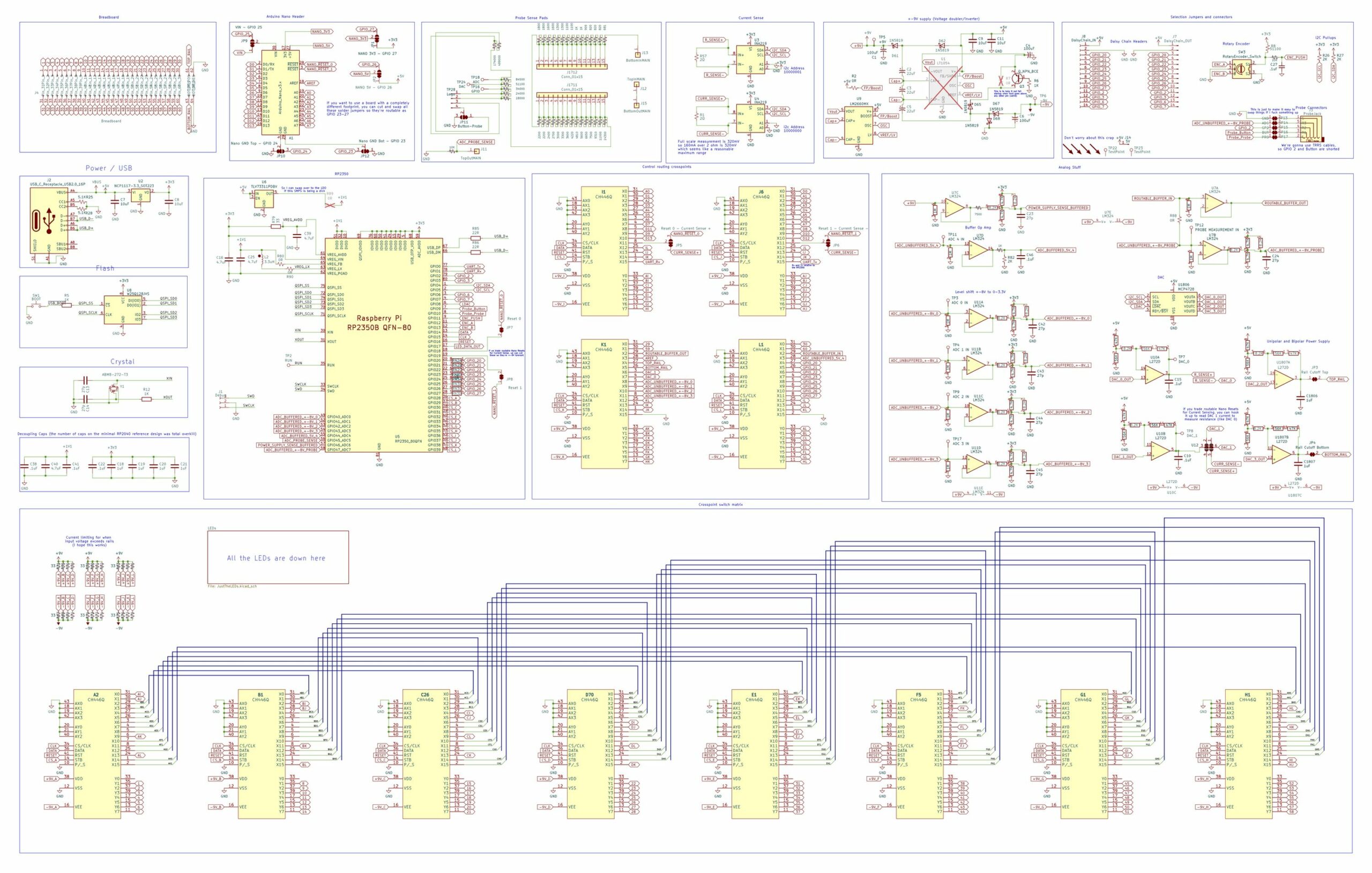
Схема V5 без перемычек
Проект Jumperless V5 — это программное обеспечение и оборудование с открытым исходным кодом, со схемами, файлами дизайна, прошивкой, 3D-моделями оболочки макетной платы и кодом приложения для настольного клиента, размещенными публично в репозитории GitHub. Jumperless V5 — одно из первых устройств, использующих новый микроконтроллер RP2350B, и оно присоединяется к таким, как плата Pimoroni Explorer, инструменты отладки Bus Pirate 5XL и 6, а также контроллер ввода-вывода Cytron IRIV.
Кампания Jumperless V5 превзошла свою цель по сбору средств на Crowd Supply. Цена составляет349$ с бесплатной доставкой по всему миру. Производитель заявляет, что возвраты всегда будут приниматься, всегда будут предлагаться полные возмещения, а ремонт всегда будет бесплатным.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.