
Большинство встраиваемых систем используются на планете Земля, но вот пришло время и некоторых из них, в прямом смысле отправляют в космос. В данном обзоре будут рассмотрено два отдельных проекта, в которых используются Arm процессоры и FPGA, а также операционные системы Ubuntu / ROS и Android: это спутники связи SpaceX Starlink и роботы Астроби на Международной Космической Станции (МКС)
Спутники SpaceX Starlink с SoC Xilinx Ultrascale+ Arm + FPGA
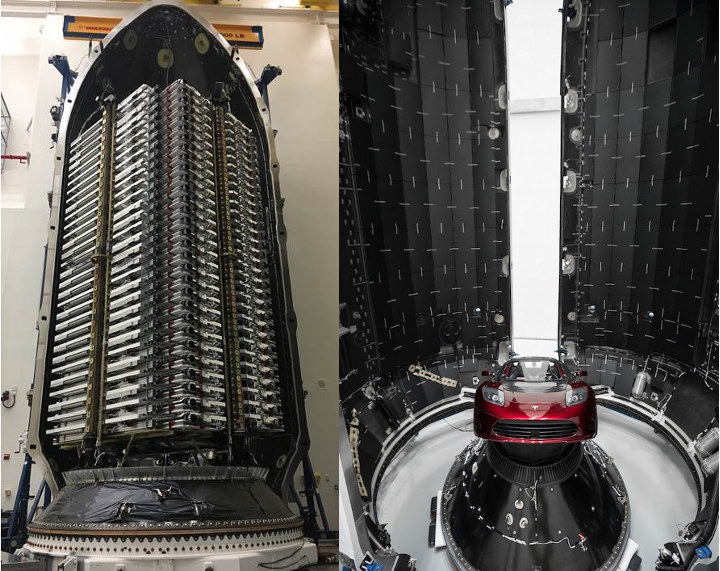
Компания SpaceX собирается запустить облако, состоящие из 60 спутников связи Starlink, целью которого является обеспечить интернет в любой точке мира. Но это только начало, поскольку в конечном итоге планируется собрать до 12000 таких спутников.
Обычно известно не так много технических подробностей о спутниках, но, как отметил один из читателей (спасибо Лоуренсу!), в новости Reddit о запуске и указал на NASA документ, в котором говориться, что спутники основаны на базе четырехъядерного процессора Xilinx Ultrascale+ Cortex-A53 с матрицей FPGA.
Веха 2 (в управлении проектом) в статье 4 этого документа есть немного больше информации:
Количественная оценка памяти, ввод-вывод и требования к вычислительной нагрузке для запуска программного обеспечения RTGx спутников Linux Xilinx Ultrascale+ quad A53s и описание интерфейса (GPS наблюдение), обеспечивается двухчастотным GPS-приемником для программного обеспечения RTGx
Несмотря на то, что на странице SoC Ultrascale+ FPGA Arm, компания Xilinx не указала информацию о радиационной защите (Radiation-hard и Radiation-tolerant), они планировали в презентации 2016 года (см. Стр. 12) продвижение MPSoC Zynq UltraScale+ в космических применениях, а RT-ZU19EG должен быть радиационно-стойким, поэтому, возможно, именно его и использует компания SpaceX в своих спутниках Starlink.
Роботы Астроби работают под управлением Ubuntu / ROS и Android 7.1, и основаны на базе SoM Inforce Snapdragon и Wandboard SBC
Также не так давно на Linux Gizmos был написан обзор об одном космическом проекте: про свободно летающих роботов Астроби на МКС, которые работают на старом добром SBC Wandboard, SoM Inforce 6601 Micro, основанные на базе процессора Qualcomm Snapdragon 820, а также SoM Inforce 6501 Micro, который оснащен SoC Snapdragon 805.
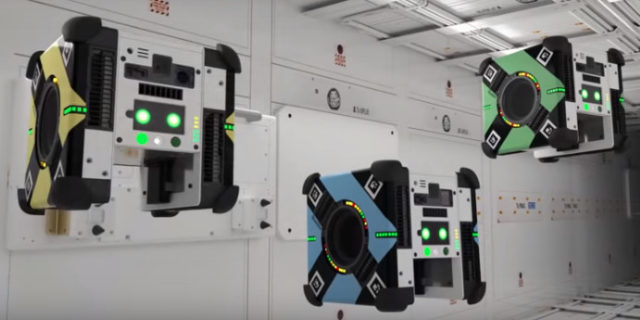
В настоящее время на станции находятся три Астроби, это роботы в форме куба оснащенные сенсорным экраном, шестью камера, динамиком, микрофоном, фонариками, лазерной указкой, различными кнопками, а также светодиодами и работают от батарейки. Они перемещаются по космической станции с помощью простых вентиляторов и их основной целью является помощь астронавтам в контроле оборудования с помощью своих камер и микрофонов.
SoM Snapdragon 820 работает на “процессоре высокого уровня (HLP)” под управлением Android 7.1 для управления сенсорным экраном, динамиком, микрофоном и SciCam, тогда как Ubuntu 16.04 / ROS работает на “процессоре среднего уровня (MLP)” на основе модуля Snapdragon 805 и отвечает за компьютерное зрение и картографию. На плате Wandboard Dual также работает Ubuntu 16.04 / ROS на “процессоре низкого уровня (LLP)” для обработки оценки поз и цикла управления движением, а также IMU и Power Manager. Другая плата Wandboard Dual также используется в зарядной док-станции для роботов.
Выражаем свою благодарность источнику из которого взята и переведена статья, сайту cnx-software.com.
Оригинал статьи вы можете прочитать здесь.