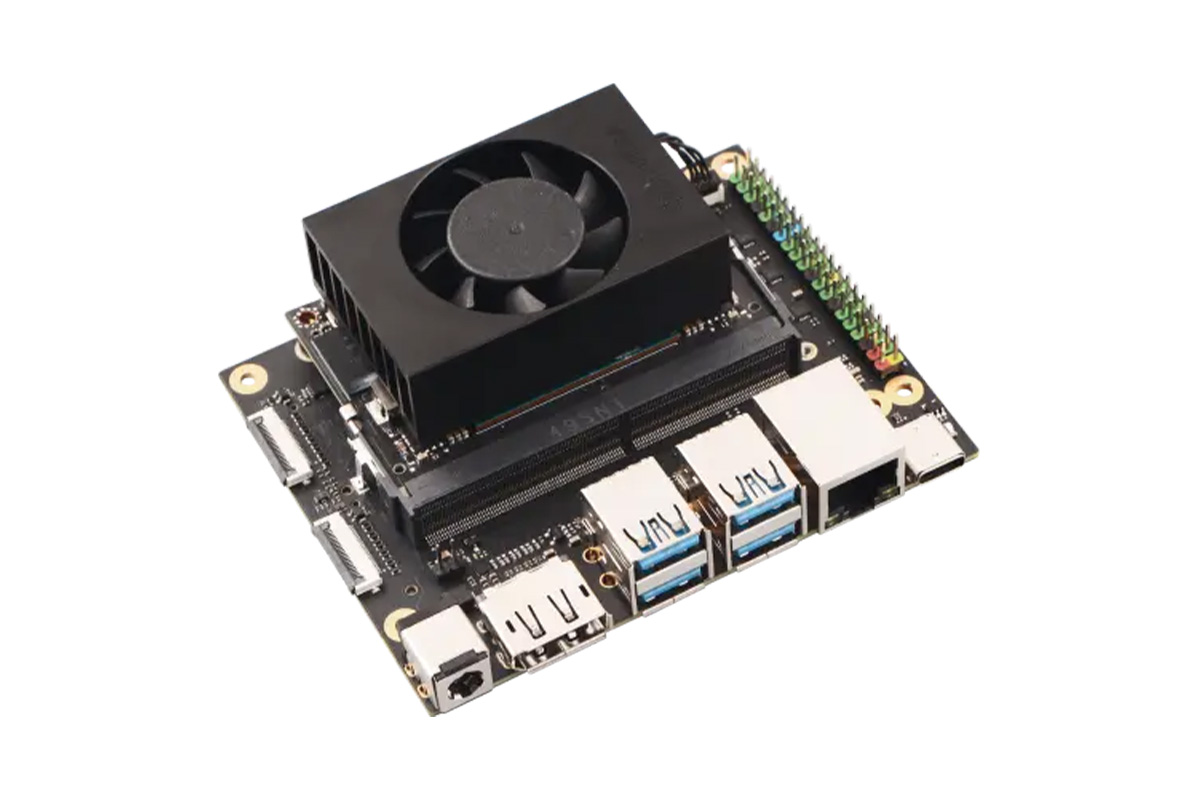
Компания Forlinx Embedded недавно выпустила FCU3011 — компактный промышленный AI-компьютер для периферийных вычислений с пассивным охлаждением на базе NVIDIA Jetson Orin Nano, предназначенный для круглосуточной работы на производстве, в системах умных городов, робототехнике и машинного зрения, где требуется обработка в реальном времени.
Система с пассивным охлаждением поддерживает конфигурации NVIDIA Jetson Orin Nano 4 ГБ (34 TOPS) или 8 ГБ (до 67 TOPS), с памятью LPDDR5 объемом 4/8 ГБ и NVMe SSD PCIe x4 на 128 ГБ. Варианты подключения включают до четырех портов Gigabit Ethernet, USB 3.0/2.0, HDMI 2.0 (4K), слот для SD-карты, опциональные модули 4G/5G и двухдиапазонный Wi-Fi через слоты M.2, а также промышленные интерфейсы, такие как изолированный RS-485, CAN, оптоизолированные входы, релейные выходы и RTC. Система получает широкий вход постоянного тока 9–24 В, имеет интерфейсы с защитой от ESD и может использоваться для AGV, визуального контроля, умных фабрик, интеллектуального анализа трафика, медицинских устройств и небольших коммерческих роботов.