
Parrot и Canonical стали партнерами, чтобы разработать набор инструментальных средств Parrot Slamdunk для разработки приложений для автономной навигации, обхода препятствий, навигации и 3D — карт для беспилотных летательных аппаратов и роботов, а также работу как на Ubuntu 14.04 так и на ROS . Название набора происходит от «Алгоритма синхронной локализации и картографии » (S.L.A.M) , позволяющая найти местоположение без сигнала GPS.
Parrot Slam Dunk предварительные характеристики:
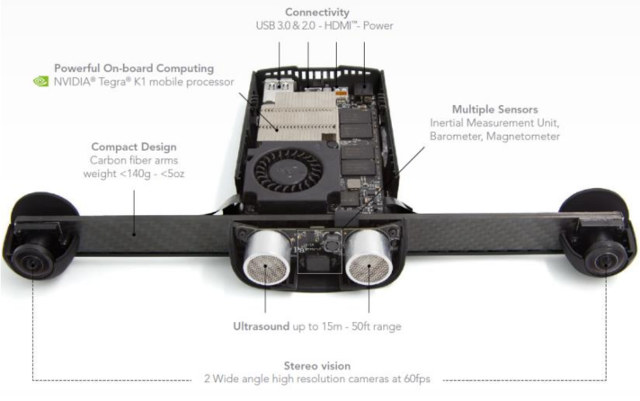
- SoC — процессор NVIDIA Tegra K1
- Камера — стерео камера с разрешением 1500 × 1500 при 60fps
- Датчики — инерционно-единичные измерения (ИДУ), ультразвуковой датчик до 15 метров, магнитометр, барометр
- Видео выход — микро HDMI
- USB — 1x микро USB 2.0 порт, 1x USB 3.0 / 2.0 порт
- Вес — 140 грамм
Parrot Slam Dunk может быть установлена в различные беспилотные летательные аппараты и робототехнические платформы, такие как квадрокоптеры с фиксированными крыльями и т.д. Компьютерный модуль затем подключается к хост-платформе через 3,5 мм разъему для кабеля и кабель USB для того, чтобы передавать и принимать команды и данные.

Parrot Slam Dunk основан на наиболее часто используемых механизмах стерео зрения. Микро HDMI позволяет разработчикам подключить компьютер к монитору с целью разработки и применения для Ubuntu и ROS.
Parrot Slam Dunk будет доступен в 4 — м квартале 2016 года с неустановленной ценой. Более подробную информацию можно найти на сайте разработчика
Благодарим сайт cnx-software.com за предоставленную информацию
Оригинал статьи тут